Accelerating XGBoost with Dask using multiple AMD GPUs#

26 Jan, 2024 by .
XGBoost is an optimized library for distributed gradient boosting. It has become the leading machine learning library for solving regression and classification problems. For a deeper dive into how gradient boosting works, we recommend reading Introduction to Boosted Trees.
In this blog, we show you how to build and install XGBoost with ROCm support, and how to accelerate XGBoost training on multiple AMD GPUs using Dask. To accelerate XGBoost on multiple GPUs, we leverage the AMD Accelerator Cloud (AAC), a platform that offers on-demand GPU cloud computing resources. Specifically, we’re using the AAC Dask Docker container with four GPUs to accelerate XGBoost training. Access to AAC is required to follow along.
Installation#
After launching a Dask workload on AAC, clone the XGBoost ROCm repository and cd
into it.
git clone https://github.com/ROCmSoftwarePlatform/xgboost.git
cd xgboost
git submodule update --init --recursive
Next, build XGBoost from source. We’re building on MI 200 Instinct Series GPUs, so we set
DCMAKE_HIP_ARCHITECTURES to gfx90a. If you’re using different architecture, modify this
accordingly. You can look up your architecture using: rocminfo | grep gfx.
mkdir build
cd build
cmake -DUSE_HIP=ON -DCMAKE_HIP_ARCHITECTURES="gfx90a" -DUSE_RCCL=1 ../
make -j
You can now compile XGBoost into a Python package. It should install XGBoost version 2.1.0-dev.
cd python-package
pip install .
Once the XGBoost installation with ROCm support is complete, you can use it with Dask for distributed training and inference across AMD GPUs.
Getting started#
Download a training dataset to measure the speedups achieved by distributing computations over multiple GPUs. We use the Higgs boson dataset, where the goal is to differentiate a signal process that produces Higgs bosons from those that do not.
wget http://mlphysics.ics.uci.edu/data/higgs/HIGGS.csv.gz
gunzip HIGGS.csv.gz
Import the libraries you’ll need for XGBoost training.
import time
import os
import dask
import pandas as pd
import xgboost as xgb
from distributed import Client
from dask import dataframe as dd
from dask_hip import LocalHIPCluster
from xgboost.dask import DaskDMatrix
Distributed environment#
To perform multi-GPU training using XGBoost, you need to set up your distributed environment with Dask. A Dask cluster consists of three different components: a centralized scheduler, one or more workers (GPUs), and a client to submit tasks to the cluster.
To distribute XGBoost computations across a Dask cluster:
Set num_gpus to the number of GPUs you want to use. This will be used to specify which devices to
use. Then, create a cluster in single-node mode with LocalHIPCluster and connect a client to this
cluster.
num_gpus = 4
devices = ','.join([str(i) for i in range(num_gpus)])
cluster = LocalHIPCluster(HIP_VISIBLE_DEVICES=devices)
client = Client(cluster)
Your distributed environment is now set up for computation.
Load data#
The dataset comes pre-balanced, cleaned, and standardized. For benchmarking purposes, we train using the full dataset and load it as a Dask dataframe.
colnames = ['label'] + ['feature-%02d' % i for i in range(1, 29)]
fn = 'HIGGS.csv'
df = dd.read_csv(fn, header=None, names=colnames, dtype='float32')
X = df[df.columns.difference(['label'])]
y = df['label']
Training#
We then create an xgboost.dask.DaskDMatrix object and pass it to xgboost.dask.train(), along with
other parameters, much like XGBoost’s normal, non-Dask interface. Unlike that interface, data and
labels must be either Dask DataFrame or Dask Array instances.
dtrain = xgb.dask.DaskDMatrix(client, X, y)
start_time = time.time()
param = {
'max_depth': 8,
'objective': 'reg:squarederror',
'tree_method': 'gpu_hist',
'device': 'gpu'
}
print('Training')
bst = xgb.dask.train(client, param, dtrain, num_boost_round=1000)
print("[INFO]: ------ Training is completed in {} seconds ------".format((time.time() - start_time)))
With XGBoost’s Dask train interface, we pass our Dask client as an additional argument for carrying out the computation.
[INFO]: ------ Training is completed in 24.53920841217041 seconds ------
Inference#
The Dask interface has 2 prediction functions: predict and inplace_predict. We use the predict
function. After obtaining the trained model booster, inference can be done using:
booster = bst['booster']
# Set to use GPU for inference.
booster.set_param({'device': 'gpu'})
# dtrain is the DaskDMatrix defined above.
prediction = xgb.dask.predict(client, booster, dtrain)
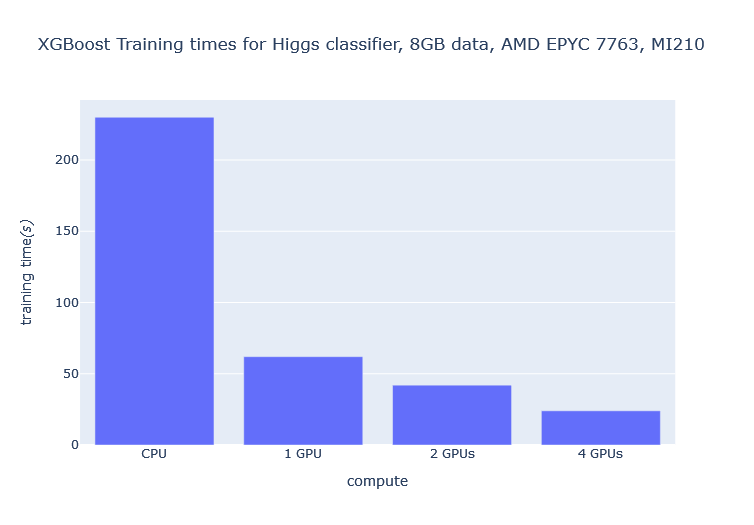
Performance#
You can see significant reduction in training time as you increase the number of GPUs. For example, increasing the number of GPUs from 1 to 4 results in a 2.6x decrease in training time and over 10x decrease relative to a CPU training run.
Disclaimer#
Third-party content is licensed to you directly by the third party that owns the content and is not licensed to you by AMD. ALL LINKED THIRD-PARTY CONTENT IS PROVIDED “AS IS” WITHOUT A WARRANTY OF ANY KIND. USE OF SUCH THIRD-PARTY CONTENT IS DONE AT YOUR SOLE DISCRETION AND UNDER NO CIRCUMSTANCES WILL AMD BE LIABLE TO YOU FOR ANY THIRD-PARTY CONTENT. YOU ASSUME ALL RISK AND ARE SOLELY RESPONSIBLE FOR ANY DAMAGES THAT MAY ARISE FROM YOUR USE OF THIRD-PARTY CONTENT.