Featured Posts
ROCm 7.14: TheRock Goes Production and Expands AMD's AI Software Platform
Explore what's new in ROCm 7.14: TheRock goes production, expanded hardware support, stronger AI frameworks, and enhanced profiling tools.
Occupancy Math on the AMD MI355X GPU (CDNA4): A From-First-Principles Guide
Derive MI355X GPU (CDNA4) occupancy by hand: the four limiters, MXFP8 GEMM examples, and why matrix-bound kernels hit peak throughput at low occupancy.

Technical Dive into AMD's MLPerf Training v6.0 Submission
In this blog, we share the technical details of how we accomplish the results in our MLPerf Training v6.0 submission.

Running Variational Quantum Eigensolver with Qiskit Aer on AMD Instinct
A step-by-step guide to running GPU-accelerated VQE for quantum chemistry with Qiskit Aer on AMD Instinct using ROCm.
Closing the GPU Cluster Validation Gap: A Kubernetes-Native Approach with CVF
Learn how to validate AMD GPU clusters end-to-end with CVF: hardware acceptance, mesh bandwidth, RDMA, and RCCL testing in one pipeline.
AMD GPU Operator v1.5.0: DRA Support, Automated GPU Node Recovery, and Expanded Kubernetes Infrastructure Control
Discover how AMD GPU Operator v1.5.0 improves GPU scheduling, automates node recovery, and expands Kubernetes control.
Attention Decode on AMD MI450 GPUs: A Gluon Kernel Optimization Guide
Learn how to design a high-performance attention decode kernel on AMD MI450 GPUs using Gluon.

Enabling Language-specific Reasoning in Multilingual Models with Reinforcement Learning
Learn how to train multilingual reasoning models with reinforcement learning and extend context windows on AMD Instinct GPUs.
Introducing Instella-MoE: A State-of-the-Art Fully Open Mixture-of-Experts Language Model
Explore Instella-MoE-16B-A3B, AMD’s fully open 16B MoE LLM with 2.8B active params per token, trained on AMD Instinct™ MI300 & MI325 GPUs.

Onboard and Deploy Custom Models in AMD AI Workbench
Learn how to deploy custom models in AMD AI Workbench, utilizing the AIM Engine, orchestration, scaling, profile parameters and API keys.

Efficient MiniMax-M3 Inference on AMD Instinct GPUs with ATOM and ATOMesh
Serve and benchmark MiniMax-M3 on AMD Instinct MI355X GPUs using ATOM and ATOMesh with EAGLE3 speculative decoding.
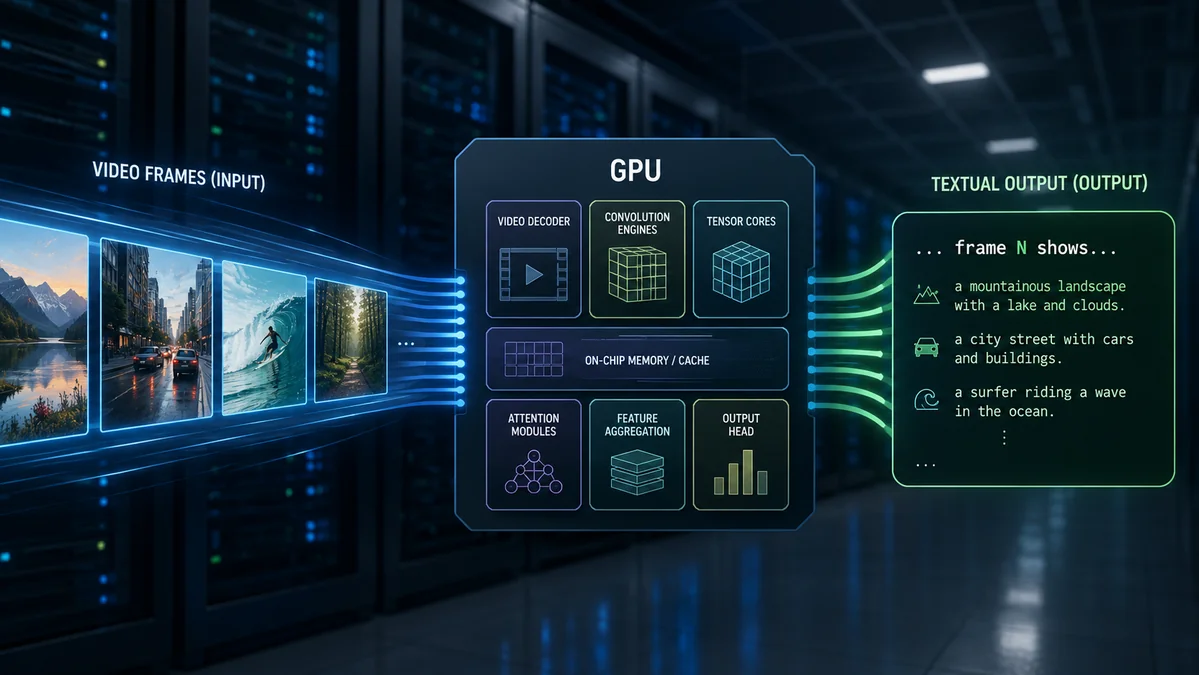
Building a High-Performance Video Inference Pipeline with ROCm Libraries Using C/C++
Learn how to build a powerful, GPU-accelerated video analytics pipeline with ROCm, combining rocDecode for fast hardware video decoding and MIGraphX for efficient AI-powered analysis and inference.

Serve Kimi-K2.5-MXFP4 on MI355X with ATOM
Serve Kimi-K2.5-MXFP4 on MI355X with ATOM and gfx950 block-scaled FP4 kernels for optimized LLM inference.

Hyperloom - Autonomous Agentic Inference Optimization for AMD GPUs
Hyperloom is a new open-source, agentic system aimed at automating the time-consuming task of optimizing end-to-end inference workloads.

Introducing AMD ROCm™ Infera: Scaling Goodput for Agentic AI with Distributed Inference Orchestration
Explore how AMD ROCm Infera orchestrates distributed inference to scale goodput for agentic AI on AMD Instinct GPUs.
Spur: Modern GPU Job Scheduling for HPC and AI Workloads
Explore how Spur addresses pain points in GPU cluster management and how Spur-Cloud extends the platform into a complete GPU-as-a-Service solution.

ROCm 7.13: Expanding Hardware, Tools, and Reach
Explore what's new in the ROCm 7.13 release, featuring expanded hardware support, GPU virtualization, enhanced developer tooling, and TheRock's modular packaging.
Styled Text Image Generation with Eruku on AMD
Hands-on, reproducible guide to train and run Eruku on LUMI supercomputer, powered by AMD Instinct MI250X GPUs.

Elevate Your LLM Inference: Autoscaling with Ray, ROCm 7.0.0, and SkyPilot
Learn how to use multi-node and multi-cluster autoscaling in the Ray framework on ROCm 7.0.0 with SkyPilot

Building Robotics Applications with Ryzen AI and ROS 2
This blog post gives a walkthrough of how to deploy a robotics application on the AI PC integrated with ROS - the robot operating system. We showcase Ryzen AI CVML Library to do perception tasks like depth estimation and develop a custom ROS 2 node which allows easy integration with the ROS ecosystem and standard components.
Stay informed
- Subscribe to our RSS feed (Requires an RSS reader available as browser plugins.)
- Signup for the ROCm newsletter
- View our blog statistics
- View the ROCm Developer Hub
- Report an issue or request a feature
- We are eager to learn from our community! If you would like to contribute to the ROCm Blogs, please submit your technical blog for review at our GitHub. Blog creation can be started through our GitHub user guide.