Deep dive into the MI300 compute and memory partition modes#

This blog introduces the inner compute and memory architecture of the AMD Instinct™ MI300, showing you how to use the MI300 GPU’s different partition modes to supercharge performance critical applications. In this blog, you will first get a brief introduction to the MI300 architecture, explaining how the MI300 compute and memory partitions can be used to your advantage. You will then learn in detail the compute partitioning modes and the memory partitioning modes, Further, two case studies demonstrate and benchmark the performance of the different modes. For convenience this blog uses the MI300X as a case-in-point example.
MI300: Architecture, compute, and memory partitions#
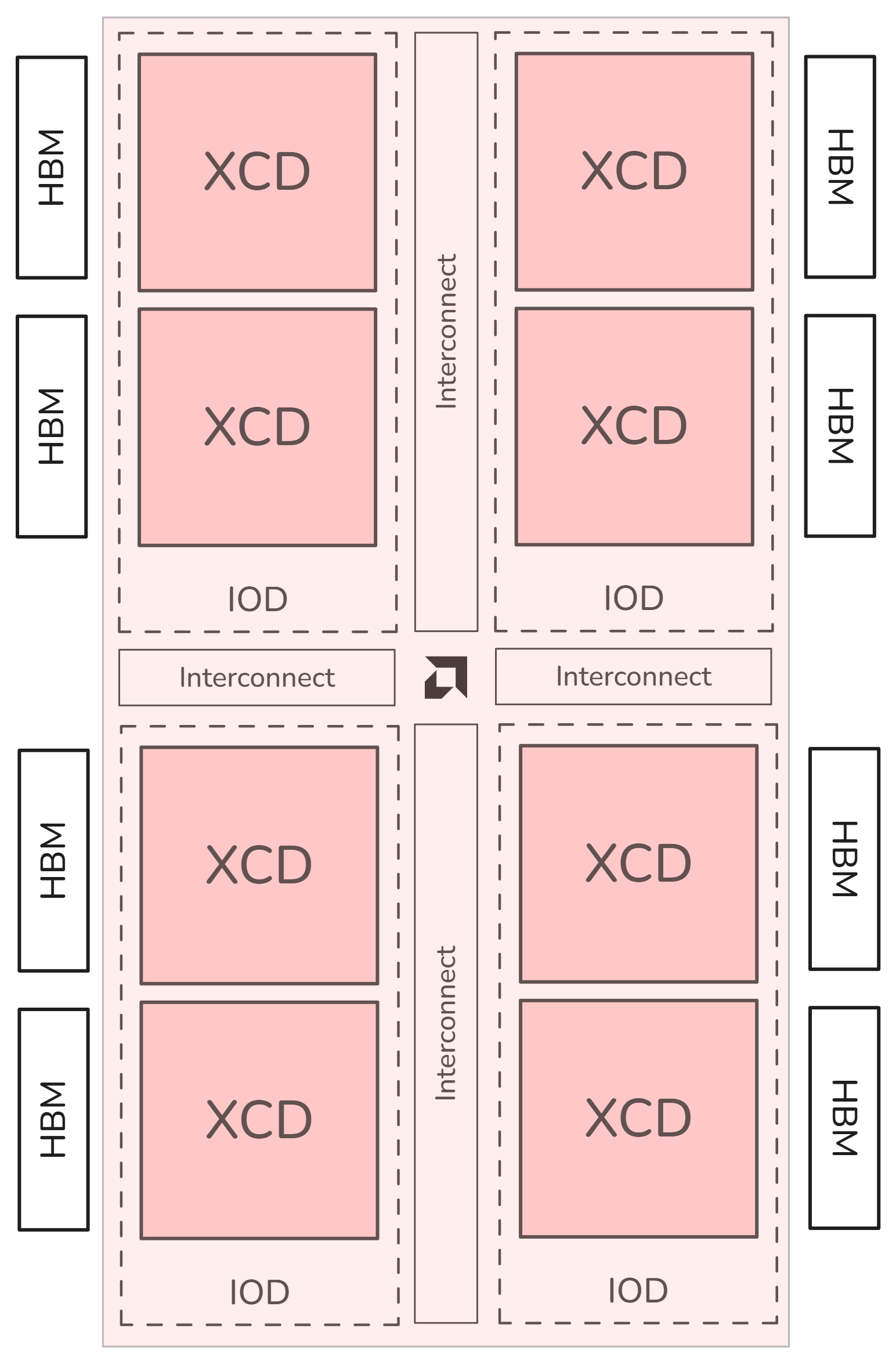
The MI300 architecture is composed of a series of networking and compute chiplets. In MI300, there are two different chiplet categories that are critical in the understanding of the architecture, the XCD (Accelerator Complex Die) and the IOD (I/O Die). A single MI300X is composed of 8 XCDs and 4 IODs. Each pair of XCDs is 3D-stacked on the top of an IOD, which are then connected using an inter-die interconnect. Each XCD has its own L2 cache, and each IOD contains a network that can connect all the XCDs to the rest of the device. Additionally, there will be some amount of higher-capacity DRAM memory attached to the device. In MI300X, this is implemented as High-Bandwidth Memory (HBM). While memory is typically exposed as a single pool to the programmer, it is physically implemented as several individual “stacks”. MI300X has 8 HBM stacks (2 per IOD).
For programming simplicity, these disparate elements are exposed to the programmer as a single logical device. However, for performance critical applications it may be worthwhile for a programmer to give up some of the niceties of this single-pool view and instead target kernels and memory allocations at the device’s distinct elements. Towards this end, this blog presents modes which allow the programmer to selectively change the logical view of the device. Primarily, these modes expose the discrete architectural elements separately. In the case of MI300X, there are memory partitioning modes, which change the view of the memory, and compute partitioning modes which change the view of the compute. To achieve this, the AMD Instinct MI300 Series GPUs support Single Root IO Virtualization (SR-IOV) that provides isolation of Virtual Functions (VFs), and protects a VF from accessing information or state of the Physical Function (PF) of another VF.
You will find experiments in this post that demonstrate the benefits of the compute and memory partitioning modes. For instance, it is show that localization of memory accesses using NUMA-Per-Socket-4 (NPS4) mode enables it to achieve 5-10% higher bandwidths in stream benchmarks.
Compute partitioning modes#
Compute partitioning modes or Modular Chiplet Platform (MCP), refers to the
logical partitioning of XCDs into devices in the ROCm stack. The names are
derived from the number of logical partitions that are created out of the eight
XCDs. In the default mode, SPX (Single Partition X-celerator), all 8 XCDs are
viewed as a single logical compute element, meaning that the amd-smi utility
will show a single MI300X device. In CPX (Core Partitioned X-celerator) mode
each XCD appears as a separate logical GPU, i.e., eight separate GPUs in
amd-smi per MI300X. CPX mode can be viewed as having explicit scheduling
privileges for each individual compute element (XCD).
Workgroup scheduling behavior#
In the SPX mode, workgroups launched to the device are distributed round-robin to the XCDs in the device. Meaning that the programmer cannot have explicit control over which XCD a workgroup is assigned to.
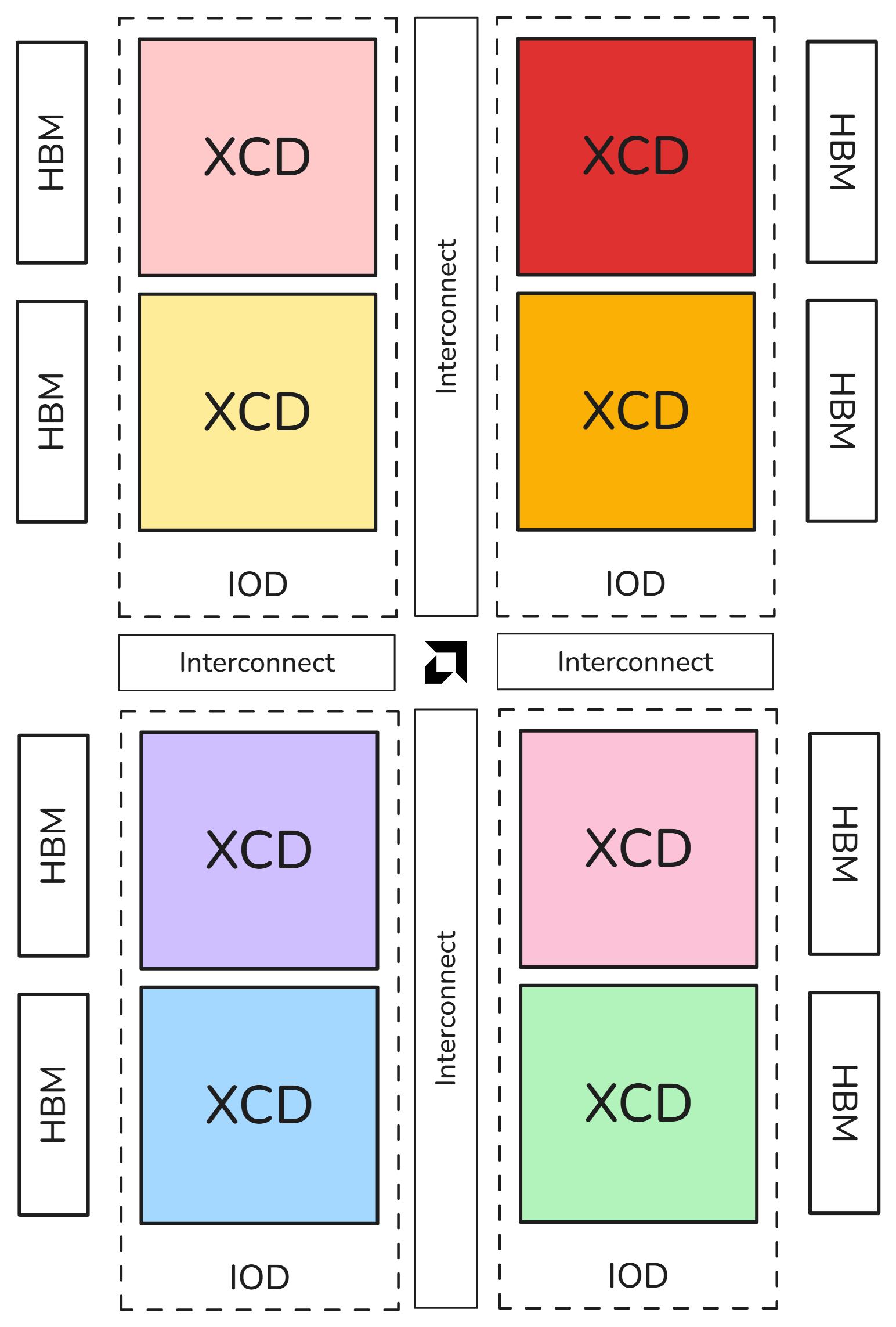
In the CPX mode, workgroups are launched to a single XCD, meaning the programmer has explicit control over work placement onto the XCDs.
|
|
|---|---|
SPX: All XCDs appear as one logical device. |
CPX: Each XCD appears as one logical device. |
Memory partitioning modes#
While compute partitioning modes change the space on which you can assign work to compute units, the memory partitioning modes (known as Non-Uniform Memory Access (NUMA) Per Socket (NPS)) change the number of NUMA domains that a device exposes. In other words, it changes the number of HBM stacks which are accessible to a compute unit, and thus the size of its memory space. However, for MI300, there can only be up to as many memory partitions as compute partitions, i.e., the number of memory partitions must be less than or equal to the number of compute partitions. NPS4 (viewing pairs of HBM stack as a disparate element), for example is only enabled when in CPX mode (viewing each XCD as a disparate element).
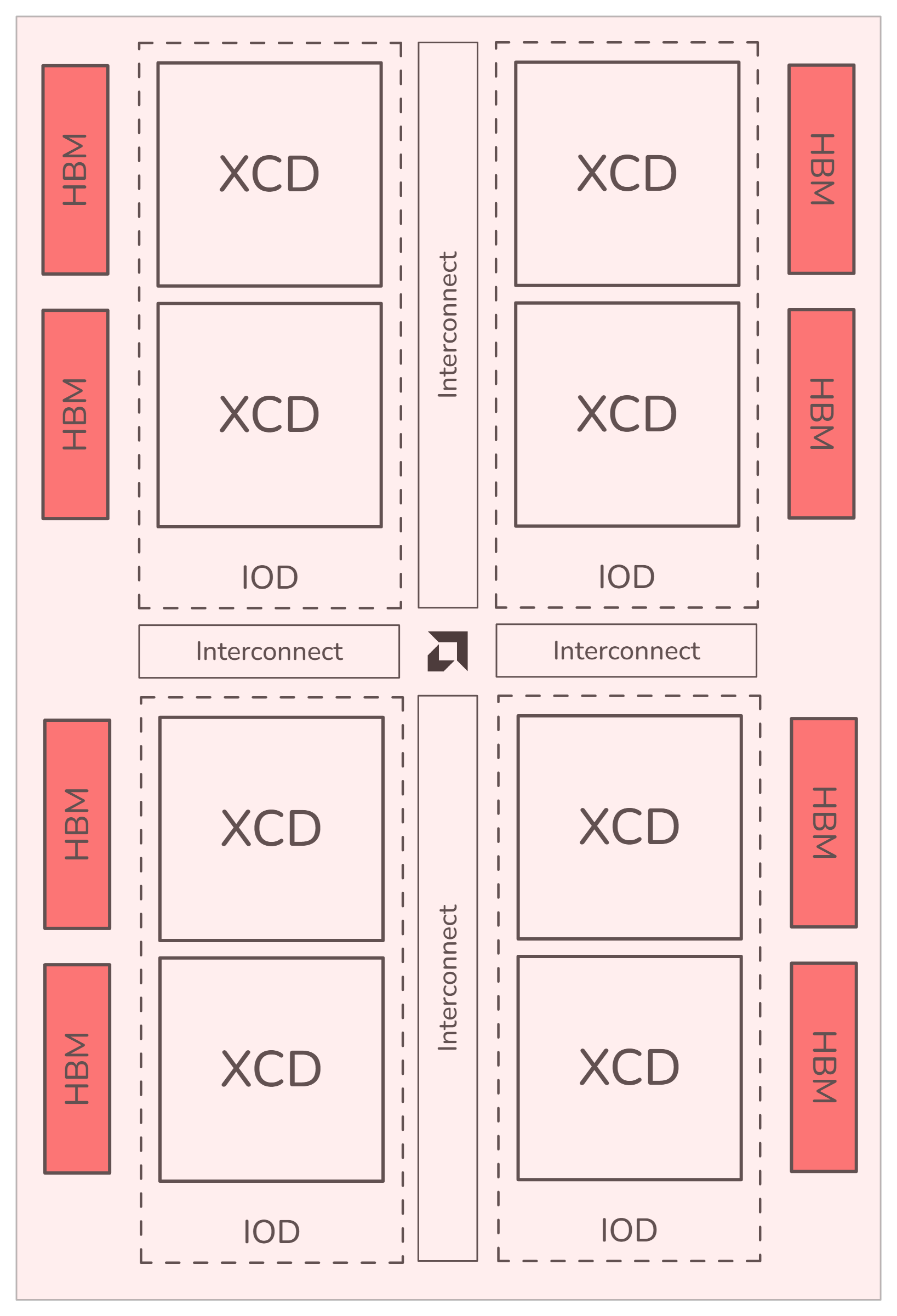
In NPS1 mode (compatible with CPX and SPX), the entire memory is accessible to all XCDs.
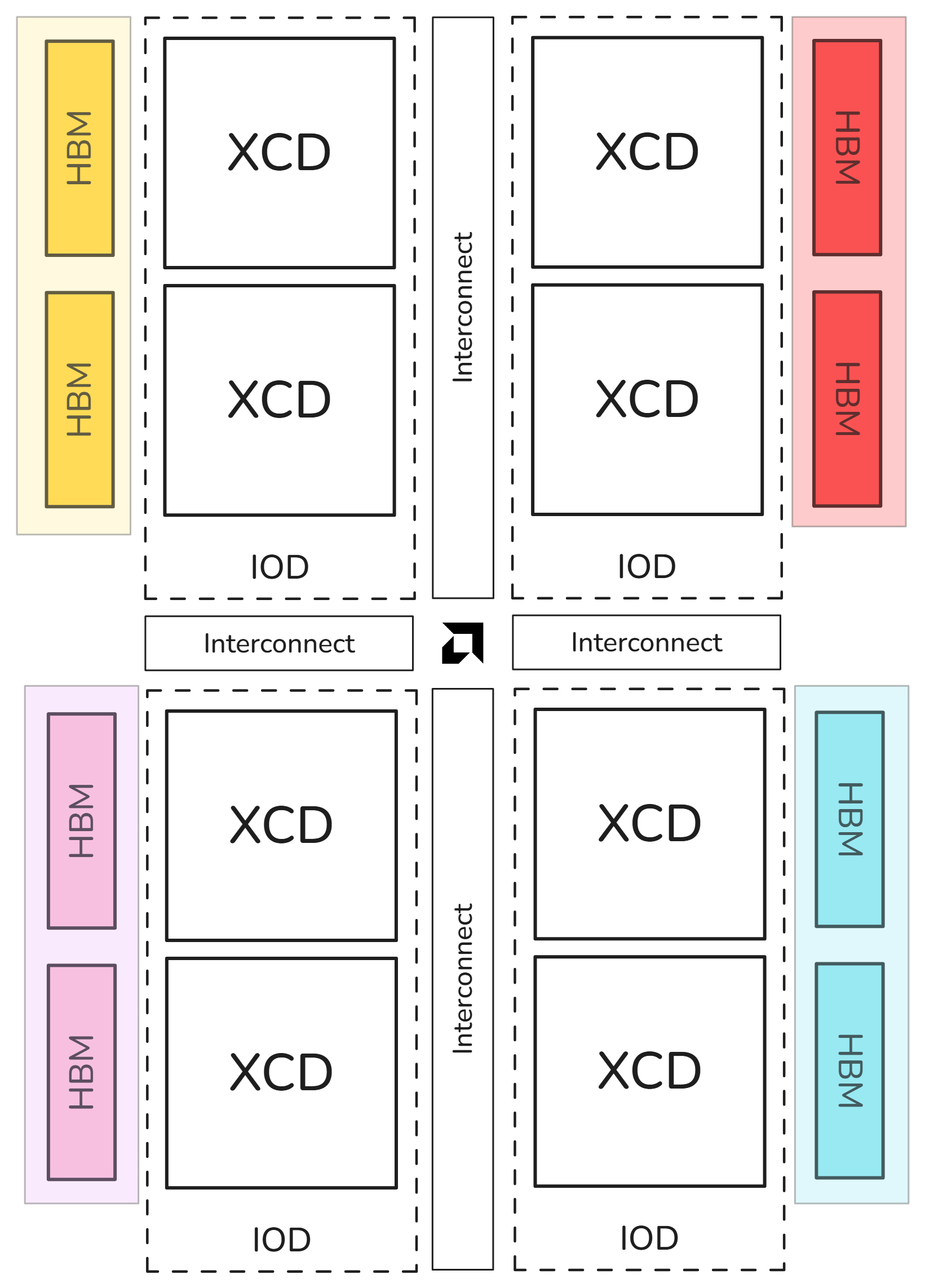
In NPS4 mode (compatible with CPX) Each memory quadrant of the memory is directly visible to the logical devices in it’s quadrant. An XCD can still access all portions of memory through multi-GPU programming techniques.
|
|
|---|---|
NPS1: All HBM stacks appear as one partition. |
NPS4: Pairs of HBM stacks appear as a partition. |
Compatibility matrix#
SPX (MI300X) |
CPX (MI300X) |
|
|---|---|---|
NPS1 |
✔ |
✔ |
NPS4 |
✔ |
Quick Start Guide#
The AMD System Management Interface (amd-smi) is a command-line utility that lets you monitor and manage AMD GPUs within the ROCm software stack. It allows for the configuration of compute and memory partitioning modes on MI300 series GPUs, through the mechanisms shown in the example.
amd-smi set --compute-partition {CPX, SPX, TPX} Set one of the following the compute partition modes: CPX, SPX, TPX
set --memory-partition {NPS1, NPS4} Set one of the following the memory partition modes: NPS1, NPS4
reset --compute-partition Reset compute partitions on the specified GPU
reset --memory-partition Reset memory partitions on the specified GPU
Sample usage:
amd-smi set --gpu all --compute-partition CPX
amd-smi set --gpu all --memory-partition NPS4
Considerations when choosing the mode#
Single (Monolithic) Partition View |
Partitioned Memory and Compute View |
|---|---|
Automatic placement of memory and compute; single-GPU programming over multiple memory and compute domains. |
Gives the programmer more control over scheduling and memory placement. |
Coherent view of memory, no explicit communication required. |
Can achieve higher bandwidth and lower latency to memory, with additional small savings for kernel launch in CPX mode. |
Simpler programming model and programmability. |
Can save power, and achieve closer to peak efficiency of the device. |
Working with partitioned devices#
This section introduces methodologies for system administrators or programmers to interact with partitioned devices through provided tools and APIs.
Multi-GPU/Multi-Partition programming#
Working with partitioned devices is no different than simple multi-GPU programming. With partitioned GPUs, the user is just exposed to more GPUs in the system than the available physical GPUs, and programs them using the existing multi-GPU programming APIs and techniques. This blog highlights two simple use-cases, the first through C/C++ HIP (Heterogeneous-computing Interface for Portability) APIs and the second using Python (PyTorch).
Using HIP APIs#
AMD provides HIP APIs that allows C/C++ interaction with the HIP runtime. This includes the ability to select dynamically in C/C++ code which allows developers to gather information about available GPUs and set their GPU targets directly from their C++ code.
hipSetDevice(int deviceId): Sets the GPU device to be used for subsequent HIP Operations, device allocations, and launches.hipGetDevice(int* deviceId): Retrieves the current device ID.hipStream_t: Represents a stream in which HIP kernels are launched and synchronized.hipStreamSynchronize(hipStream_t stream): Synchronizes and waits for all kernels in a stream to complete.
A simple vector add kernel to use as an example for multi-partition programming:
#include <hip/hip_runtime.h>
#include <iostream>
#include <vector>
__global__ void vector_add(const float* A, const float* B, float* C, int n) {
int i = blockIdx.x * blockDim.x + threadIdx.x;
if (i < n)
C[i] = A[i] + B[i];
}
A driver function to setup data and streams on available GPUs, and launch a section of the work on partitioned devices using streams:
int main() {
// Get number of available partitioned devices
int num_devices = 0;
hipGetDeviceCount(&num_devices);
std::cout << "Number of available GPUs: " << num_devices << "\n";
// Size of vectors
constexpr int N = 1 << 20;
// Host vectors
std::vector<float> h_A(N, 1.0f);
std::vector<float> h_B(N, 2.0f);
std::vector<float> h_C(N, 0.0f);
// Partition data between GPUs
int chunk_size = N / num_devices;
// Store device pointers and GPU streams
std::vector<float*> A(num_devices);
std::vector<float*> B(num_devices);
std::vector<float*> C(num_devices);
std::vector<hipStream_t> streams(num_devices);
// Launch computations on each GPU partition on separate streams
for (int dev = 0; dev < num_devices; ++dev) {
hipSetDevice(dev); // Set active device
int offset = dev * chunk_size;
int size = (dev == num_devices - 1) ? (N - offset) : chunk_size;
// Allocate device memory
hipMalloc(&A[dev], size * sizeof(float));
hipMalloc(&B[dev], size * sizeof(float));
hipMalloc(&C[dev], size * sizeof(float));
// Create stream
hipStreamCreate(&streams[dev]);
// Copy data to device
hipMemcpyAsync(A[dev], h_A.data() + offset, size * sizeof(float), hipMemcpyHostToDevice, streams[dev]);
hipMemcpyAsync(B[dev], h_B.data() + offset, size * sizeof(float), hipMemcpyHostToDevice, streams[dev]);
// Launch kernel on GPU/GPU partition
int block_size = 256;
int grid_size = (size + block_size - 1) / block_size;
hipLaunchKernelGGL(vector_add, dim3(grid_size), dim3(block_size), 0, streams[dev], A[dev], B[dev], C[dev], size);
// Copy result back to host
hipMemcpyAsync(h_C.data() + offset, C[dev], size * sizeof(float), hipMemcpyDeviceToHost, streams[dev]);
}
// Synchronize all streams
for (int dev = 0; dev < num_devices; ++dev) {
hipSetDevice(dev);
hipStreamSynchronize(streams[dev]);
}
// Verify results
for (int i = 0; i < N; ++i) {
if (h_C[i] != 3.0f) {
std::cerr << "Verification failed at index: " << i << "\n";
return -1;
}
}
std::cout << "Verification succeeded." << std::endl;
// Cleanup
for (int dev = 0; dev < num_devices; ++dev) {
hipSetDevice(dev);
hipFree(A[dev]);
hipFree(B[dev]);
hipFree(C[dev]);
hipStreamDestroy(streams[dev]);
}
return 0;
}
Using PyTorch in Python#
PyTorch is a flexible deep learning framework in python with dynamic computation graphs, automatic differentiation, and GPU acceleration for training and inference. It supports a broad range of AI applications, from vision to NLP. ROCm supports PyTorch, enabling high-performance execution on AMD GPUs. PyTorch APIs can also utilize compute and memory partitioning modes through their own multi-device management APIs.
torch.cuda.set_device(device_id): Sets the default device.torch.cuda.current_device(): Returns the index of the current device.torch.cuda.Stream(): Creates a stream for asynchronous operations.torch.cuda.synchronize(device=None): Waits for all kernels in all streams on a device to complete.
In the PyTorch/Python example, the same techniques as the HIP code have been
used; get available devices, set an active device, allocate/initialize the data
for that device, and launch the GPU kernel. The only difference is, in addition
to a multi-GPU kernel launch, torch.multiprocessing is also used to launch all
the work in parallel using CPU threads.
Note
The ‘spawn’ start method starts a fresh Python interpreter process. It ensures that the child process doesn’t inherit any unnecessary resources from the parent, including the HIP/CUDA context. This method is safer when working with HIP/CUDA and multiprocessing.
import torch
import torch.multiprocessing as mp
# Function to perform matrix multiplication on a GPU
def gpu_matrix_multiplication(device_id, size):
torch.cuda.set_device(device_id)
print(f"Running on device {torch.cuda.current_device()}")
# Create tensors on the device
with torch.cuda.device(device_id):
a = torch.randn(size, size, device=device_id)
b = torch.randn(size, size, device=device_id)
# Create a stream
stream = torch.cuda.Stream(device=device_id)
# Perform computation in the stream
with torch.cuda.stream(stream):
c = torch.mm(a, b)
# Synchronize the stream
stream.synchronize()
if __name__ == "__main__":
mp.set_start_method('spawn') # Required for multiprocess w/ HIP/CUDA
num_devices = torch.cuda.device_count()
N = 256 # Size of the matrices (NxN)
processes = []
for device_id in range(num_devices):
# Start a process for each GPU
p = mp.Process(target=gpu_matrix_multiplication, args=(device_id, N))
p.start()
processes.append(p)
for p in processes:
p.join()
GPU isolation techniques#
To target specific logical devices, typical GPU isolation techniques such as
HIP_VISIBLE_DEVICES or ROCR_VISIBLE_DEVICES can be used.
HIP_VISIBLE_DEVICESis an environment variable used in AMD ROCm (Radeon Open Compute) platform, specifically with the HIP programming model.ROCR_VISIBLE_DEVICESenvironment variable is part of AMD’s ROCm platform. It allows users to specify which GPUs are visible to their ROCm applications. Both individual users and system-level job schedulers (like those used with MPI applications) can set this variable to control GPU assignments and resource allocation.
ROCm documentation for
GPU isolation techniques
discusses this in detail. However, in this blog you can see some simple examples
of using both HIP_VISIBLE_DEVICES set by the user and ROCR_VISIBLE_DEVICES
to work with partitioned devices.
Using MI300X in CPX mode as an example, a system will now report 64 GPUs,
assuming an 8xMI300X system. GPU isolation techniques now have access to GPU
indices ranging from 0 to 63. An example of making IDs 9, 10, 11 and 63
available as a user would be:
export HIP_VISIBLE_DEVICES=9,10,11,63
MPI job scheduler#
The user can also use an MPI launcher (such as mpirun from OpenMPI) to assign
specific GPUs to individual MPI processes. MPI allows the user to set
environment variables for each process separately.
mpirun \
-np 1 -x ROCR_VISIBLE_DEVICES=0,8,16,32 ./my_application : \
-np 1 -x ROCR_VISIBLE_DEVICES=1,9,17,33 ./my_application
mpirunlaunches MPI processes.-np 1specifies the number of processes for the following command segment.-x ROCR_VISIBLE_DEVICES=0,8,16,32exportsROCR_VISIBLE_DEVICES=0,8,16,32to the process, making only the first CPX partition from each physical GPU (assuming 8xMI300X system) visible to the application.The second segment runs another process but with
ROCR_VISIBLE_DEVICES=1,9,17,33so the second CPX partition from each physical GPU is visible to it.Each process runs
./my_applicationwith its assigned GPU.
Deployment through Docker#
Alternatively, Docker supports attaching a device to the Docker container, this
is typically done using the --device=/dev/dri command to allow the container
to see all the GPUs in the system. However, since MI300 exposes each XCD as a
separate render device, the numbering differs slightly.
ls /dev/dri | grep renderD prints out all the render IDs, with each associated
to an individual XCD. In the examples, the render IDs start from renderD128
and go all the way to renderD191. One way to utilize this information is by
first understanding that the physical GPU’s first physical XCD begins at D128.
Given this, the next physical GPU will be a #XCD/device offset from the first,
so in MI300X the next physical GPU is D128+8=136, Device 2 will then
beD136+8=144 and so on. All the IDs in between 128 and 136 are CPX partitions
of a single MI300X.
Example 1: CPX 0 of physical GPU 0:
docker run -it --network=host --device=/dev/kfd \
--device=/dev/dri/renderD128 \
--group-add video --security-opt seccomp=unconfined -v $HOME:$HOME -w $HOME rocm/pytorch
Example 2: All CPX devices of physical GPU 0 (MI300X):
docker run -it --network=host --device=/dev/kfd \
--device=/dev/dri/renderD128 \
--device=/dev/dri/renderD129 \
--device=/dev/dri/renderD130 \
--device=/dev/dri/renderD131 \
--device=/dev/dri/renderD132 \
--device=/dev/dri/renderD133 \
--device=/dev/dri/renderD134 \
--device=/dev/dri/renderD135 \
--group-add video --security-opt seccomp=unconfined -v $HOME:$HOME -w $HOME rocm/pytorch
Example 3: CPX 0 from each physical GPU (MI300X):
docker run -it --network=host --device=/dev/kfd \
--device=/dev/dri/renderD128 \
--device=/dev/dri/renderD136 \
--device=/dev/dri/renderD144 \
--device=/dev/dri/renderD152 \
--device=/dev/dri/renderD160 \
--device=/dev/dri/renderD168 \
--device=/dev/dri/renderD176 \
--device=/dev/dri/renderD184 \
--group-add video --security-opt seccomp=unconfined -v $HOME:$HOME -w $HOME rocm/pytorch
AMD SMI#
Using MI300X in CPX mode as an example, a system will now report 64 GPUs
(assuming an 8xMI300X system) with amd-smi starting from 0 to 63. The
following output also prints out the physical Universally Unique Identifier
(UUID) of the GPU, gpu_uuid, which is same across all virtual partitions for a
given physical GPU.
amd-smi list --csv
gpu,gpu_bdf,gpu_uuid
0,0000:0c:00.0,c0ff74a1-0000-1000-80b1-06985c515c91
1,0000:0c:00.0,c0ff74a1-0000-1000-80b1-06985c515c91
2,0000:0c:00.0,c0ff74a1-0000-1000-80b1-06985c515c91
3,0000:0c:00.0,c0ff74a1-0000-1000-80b1-06985c515c91
4,0000:0c:00.0,c0ff74a1-0000-1000-80b1-06985c515c91
5,0000:0c:00.0,c0ff74a1-0000-1000-80b1-06985c515c91
6,0000:0c:00.0,c0ff74a1-0000-1000-80b1-06985c515c91
7,0000:0c:00.0,c0ff74a1-0000-1000-80b1-06985c515c91
...
56,0000:df:00.0,bbff74a1-0000-1000-80b0-9363b4d6f06e
57,0000:df:00.0,bbff74a1-0000-1000-80b0-9363b4d6f06e
58,0000:df:00.0,bbff74a1-0000-1000-80b0-9363b4d6f06e
59,0000:df:00.0,bbff74a1-0000-1000-80b0-9363b4d6f06e
60,0000:df:00.0,bbff74a1-0000-1000-80b0-9363b4d6f06e
61,0000:df:00.0,bbff74a1-0000-1000-80b0-9363b4d6f06e
62,0000:df:00.0,bbff74a1-0000-1000-80b0-9363b4d6f06e
63,0000:df:00.0,bbff74a1-0000-1000-80b0-9363b4d6f06e
amd-smi also supports useful commands like amd-smi static --partition, which
for each GPU prints the memory and compute partition mode. For example, the
following MI300X system is in CPX, NPS1 partition for all GPUs.
amd-smi static --partition
GPU: 0
PARTITION:
COMPUTE_PARTITION: CPX
MEMORY_PARTITION: NPS1
GPU: 1
PARTITION:
COMPUTE_PARTITION: CPX
MEMORY_PARTITION: NPS1
GPU: 2
PARTITION:
COMPUTE_PARTITION: CPX
MEMORY_PARTITION: NPS1
...
Using Linux control groups#
Control Groups (cgroups) is a Linux kernel feature that enables fine-grained management of device access for processes or groups. This functionality can also be leveraged to control access to individual partitions within an MI300 device at the linux kernel level. To effectively utilize cgroups in this way, it is essential to understand how to enable and restrict access to render devices using this mechanism.
First, you need a grasp on major and minor descriptors of devices as found in
/dev/dri.
$ ls -l /dev/dri/
crw-rw---- 1 root render 226, 128 Jan 13 19:42 renderD128
crw-rw---- 1 root render 226, 129 Jan 13 19:42 renderD129
crw-rw---- 1 root render 226, 130 Jan 13 19:42 renderD130
crw-rw---- 1 root render 226, 131 Jan 13 19:42 renderD131
crw-rw---- 1 root render 226, 132 Jan 13 19:42 renderD132
crw-rw---- 1 root render 226, 133 Jan 13 19:42 renderD133
crw-rw---- 1 root render 226, 134 Jan 13 19:42 renderD134
In the ls -l of /dev/dri there is one column containing 226, and one
containing the render IDs 128,129, and so on. These are the major and minor IDs
of these individual render devices, cgroups takes these IDs as input to refer to
a specific device.
The render IDs start from renderD128 and go all the way to renderD191 for an
8 GPU MI300X system. One way to utilize this information is by first
understanding that the physical GPU’s first physical XCD begins at D128. Given
this, the next physical GPU will be a #XCD/device offset from the first, so in
MI300X the next physical GPU is D128+8=136, Device 2 will then beD136+8=144
and so on. All the IDs in between 128 and 136 are CPX partitions of a single
MI300X.
The cgroups linux kernel feature allows you to isolate access to resources to
various groups. On an Ubunutu machine, you can find cgroup controls at
/sys/fs/cgroup and control over devices at /sys/fs/cgroup/devices. In
/sys/fs/cgroup/devices there will be endpoints named devices.allow and
devices.deny. Using > we can feed information to these endpoints. For
example, if you wish to deny access to the first XCD in the first device through
cgroups, you can use the command:
echo "c 226:128 rwm" > /sys/fs/cgroup/devices/devices.deny #Deny access to device 226:128 (renderD128)
Similarly, to allow access to the first XCD in the first device you can use:
echo "c 226:128 rwm" > /sys/fs/cgroup/devices/devices.allow #Allow access to device 226:128 (renderD128)
Where 128 is the “minor” identifier of the device as identified above.
This form of isolation also works in docker containers through different cgroup endpoints. The same process on these different endpoints will isolate the GPUs accesible from containers:
echo "c 226:128 rwm" > /sys/fs/cgroup/devices/devices.deny #Deny access to device 226:128 in docker (renderD128)
echo "c 226:128 rwm" > /sys/fs/cgroup/devices/devices.allow #Allow access to device 226:128 in docker (renderD128)
Note
This section described functionality using the cgroups version 1 API. Instructions to use cgroup version 2 API are the subject of a future article.
Performance evaluation#
For performance evaluation of partitioned memory and compute modes, two case studies considered are:
A Parallel Stream Microbenchmark
A General Matrix Multiplication (GEMM) Benchmark
Important
The presented simple Stream and GEMM kernels are implemented using Triton and HIP, they are not intended to represent the peak performance achievable using MI300X. There might be more throughput/bandwidth left that is further extractable through performance engineering.
Stream microbenchmark#
A streaming microbenchmark can be used to determine the maximum achievable
memory bandwidth of the NPS1 and NPS4 mode. For this experiment, Triton
copy_kernel is provided below, which loads values from a 1-D tensor x_ptr,
and stores it in a 1-D tensor y_ptr.
@triton.jit
def copy_kernel(
x_ptr, y_ptr, n_elements, BLOCK_SIZE: tl.constexpr, dtype: tl.constexpr
):
pid = tl.program_id(0)
offsets = pid * BLOCK_SIZE + tl.arange(0, BLOCK_SIZE)
mask = offsets < n_elements
x = tl.load(x_ptr + offsets, mask=mask).to(dtype)
tl.store(y_ptr + offsets, x, mask=mask)
Utilizing the CPX/NPS4 memory partitioning mode, the total data is split across four memory domains (2 HBM stacks per memory domain, one memory domain per IOD), and a separate kernel is launched to each CPX device. This results in each XCD accessing only its closest memory, which results in no inter-IOD traffic. Due to this improved localization of memory reads, NPS4 mode will typically achieve a higher peak bandwidth than in NPS1 mode, at the cost of additional complexity to write a program which utilizes multiple partitions.
Figure 1a., shows the aggregate achieved bandwidth of different compute and memory partitions. The total achieved bandwidth of an MI300X in CPX/NPS4 mode performing reads across all eight XCDs is approximately 4210 GB/s, as opposed to 4010 in CPX/NPS1 and 4017 TB/s in SPX/NPS1. Although NPS4 seems to provide better performance benefits for a simple stream microbenchmark, it is important to note that complex applications may require communication across the memory partitions (e.g. using high-performant communication collectives) and may see smaller performance benefits than an embarrassingly parallel workload. Figure 1b. provides additional analysis of the achieved bandwidth per individual XCD for an MI300X.
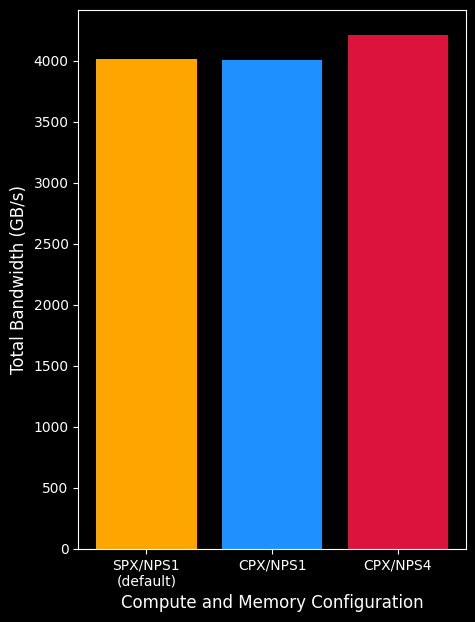
Figure 1a. The total achieved bandwidth (across the entire system) for the different modes. CPX/NPS4 is able to achieve significantly higher bandwidth due to localization of accesses to main memory. CPX/NPS1 achieves higher memory bandwidth than SPX/NPS1.
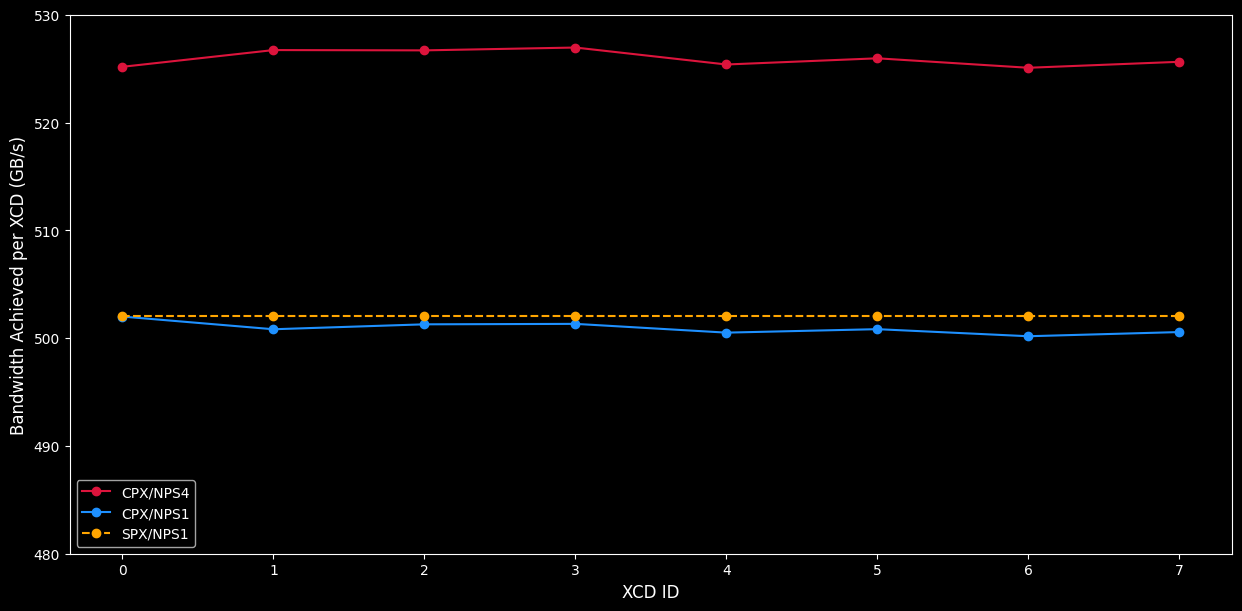
Figure 1b. Bandwidth of the streaming benchmark running concurrently on all 8 XCDs of one physical GPU 0. CPX/NPS4 achieves higher bandwidth due to improved localization of memory accesses to local HBM stacks.
Note
SPX mode always runs all 8 XCDs, the graphs with the dotted SPX line illustrate metric divided by 8 to show per-XCD average frequency.
Leveraging an IOD’s available bandwidth with a single XCD#
Figure 2a. and Figure 2b. illustrate the capability of a single MI300X chiplet to leverage the entire IOD’s bandwidth. This experiment uses the same stream microbenchmark in CPX mode, but run it across only 4 out of the 8 available XCDs on MI300X. In one setup (Figure 2a.) the 4 active XCDs are grouped to only 2 IODs, and in the second setup (Figure 2b.) the 4 active XCDs are spread across all 4 IODs, with one XCD active per IOD.
|
|
|---|---|
Figure 2a. Stream microbenchmark on XCDs 0,1,2,3. Two active XCDs per IOD, and 2 active IODs. |
Figure 2b. Stream microbenchmark on XCDs 0,2,4,6. Only a single active XCDs per IOD, and all 4 IODs are active. |
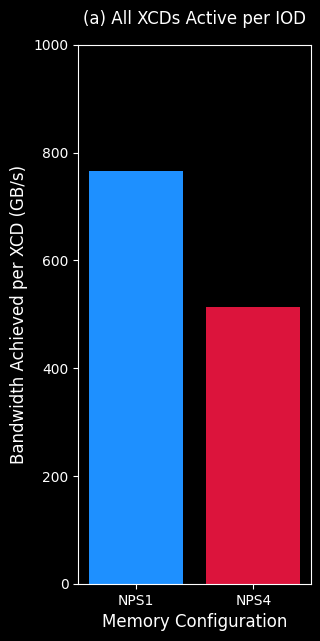
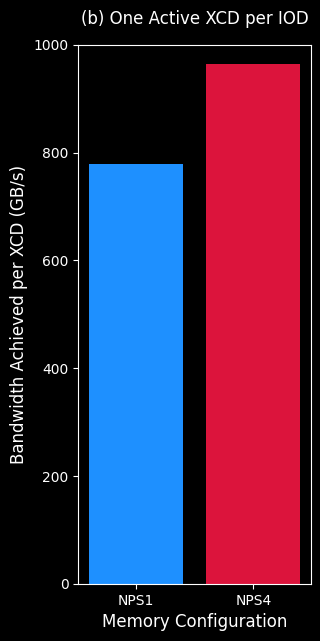
In such scenarios, operating in NPS4 mode allows the single active XCD to utilize the entire available bandwidth of that IOD achieving ~1TB/s bandwidth on its own. While the other XCDs—which share their IOD’s bandwidth with another active XCD on the same IOD—achieves only half the bandwidth. The same benefit is not as pronounced in NPS1 mode, because the data is paged across all HBM stacks, i.e. all active XCDs are requesting data from all HBMs.
However, these figures also illustrate the downside of NPS4 mode (Figure 2a.). When compared to the NPS1 mode, NPS4 achieves half the bandwidth when all XCDs on an IOD are active versus the case where a single XCD is active. NPS1 mode on the other hand achieves approximately the same effective bandwidth per XCD regardless of having a single XCD active per IOD or all XCDs active across all IOD. This is because in NPS1 mode, each XCD has all IODs’ bandwidth available with data interleaved across all HBM stacks, while in the memory partitioned mode (NPS4), the data is only interleaved across the local HBMs, and an XCD only has access to the local IOD’s available bandwidth.
A developer can leverage this principle in workloads that lack sufficient parallelism to utilize all XCDs. For example, latency- or bandwidth-bound applications that are not highly sensitive to a reduction in total compute resources can be efficiently mapped to a single XCD for improved performance, as that single XCD can take full advantage of the entire bandwidth.
General Matrix Multiplication (GEMM) benchmark#
This section will look at a more computation-bound kernel: General Matrix Matrix Multiply (GEMM), defined as \(C = \alpha AB + \beta C\), where \(\alpha\) and \(\beta\) are scalars, \(A\), \(B\) are input matrices, and \(C\) is the output matrix. For this particular GEMM microbenchmark, a size is chosen in the compute bound region (where MxNxK = 16384x16384x4096) using FP16 precision. For these plots, CPX/NPS4 and CPX/NPS1 results are presented in which progressively more XCDs are run concurrently. Also included in the plots are results from SPX/NPS1 baseline in which all 8 XCDs run concurrently.
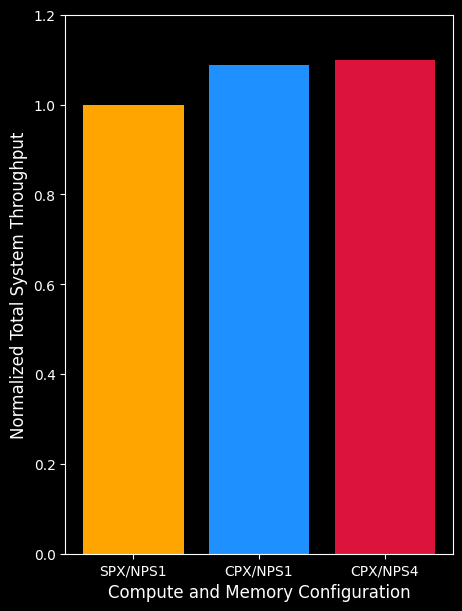
Figure 3. A plot of the total system throughput (Y-axis) for various compute and memory partitioning modes (X-axis) aggregate across all XCD. Where each XCD in CPX runs a separate GEMM operation, and a single MI300X runs a GEMM operation in SPX. CPX/NPS1 and CPX/NPS4 modes are able to achieve 10-15% higher total system throughput than SPX mode. CPX/NPS4 is able to achieve higher throughput than CPX/NPS1.
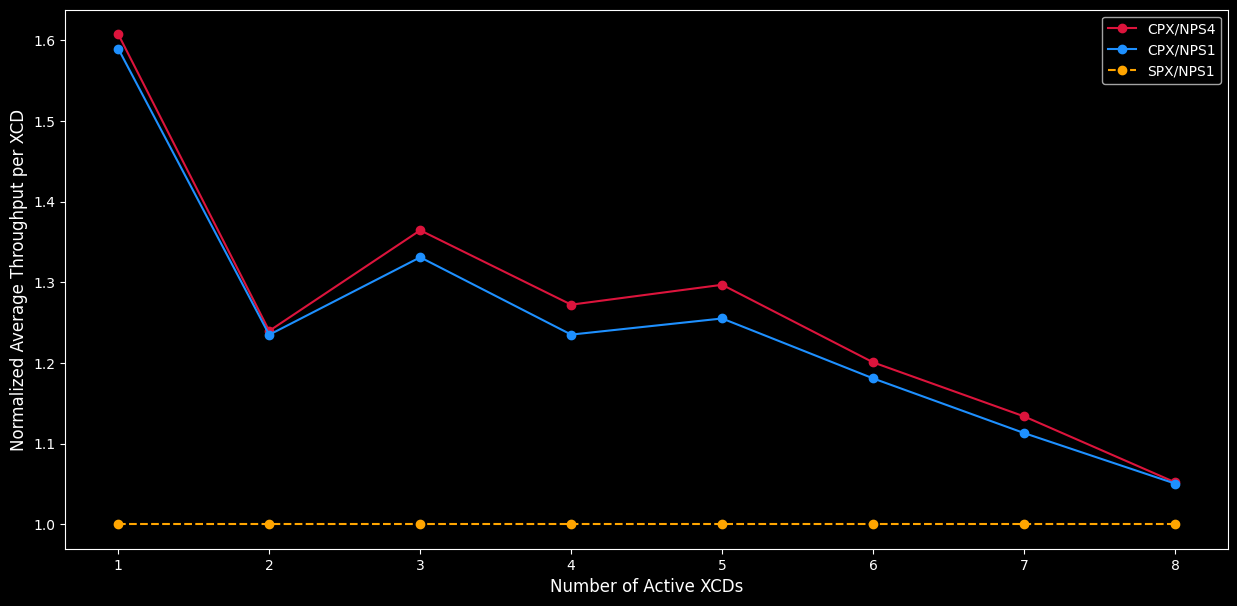
Figure 4. The plot shows the average throughput (TFLOPS) per XCD when each XCD in CPX runs a separate GEMM operation, and a single MI300X runs a GEMM operation in SPX. The Y-axis represents the average throughput per XCD, while the X-axis indicates the number of concurrently running XCDs, from 1 to 8 (SPX always runs all 8 XCDs). As more XCDs run concurrently, the throughput per XCD decreases due to competition for shared resources like bandwidth (as discussed earlier). CPX/NPS4 is able to achieve higher throughput than both CPX/NPS1 and SPX/NPS1 due to its improved localized memory acceses, allowing its clocks to run at higher rates.
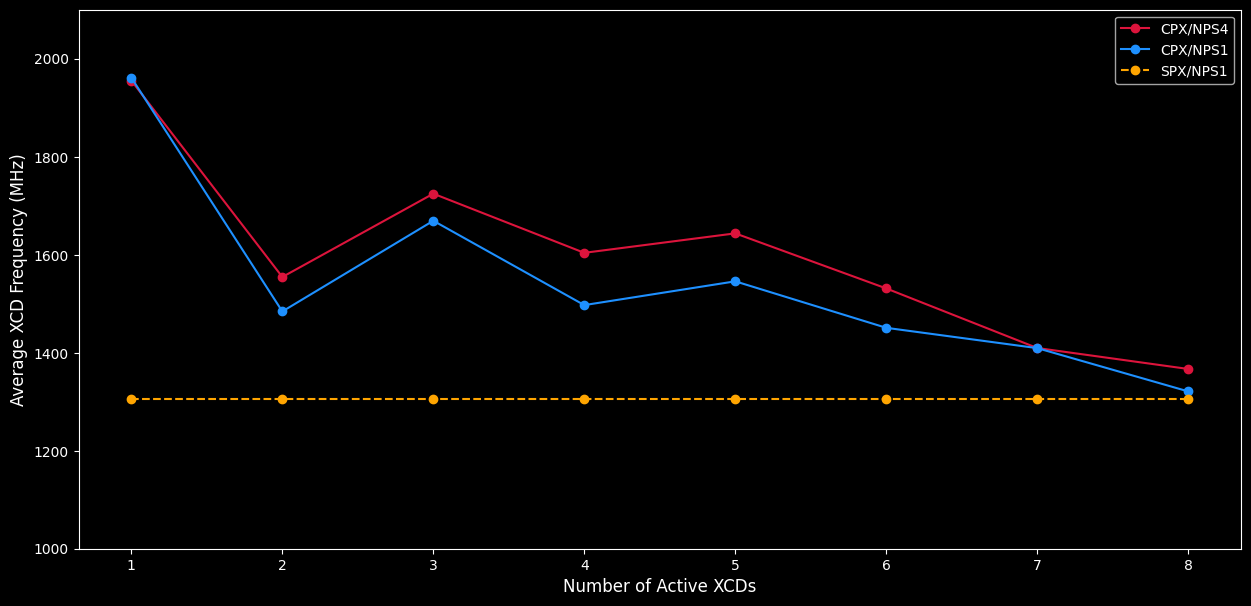
Figure 5. A plot of the average frequency (y-axis) of a device running the same workload in CPX/NPS4 mode, plotted against the number of concurrently running XCDs (x-axis). This plot mirrors the earlier “Performance per XCD” graph because an XCD’s performance is closely linked to its operating frequency. CPX/NPS4 is able to run at a consistently higher compute clock speed than both CPX/NPS1 and SPX/NPS1 due to increased localized accesses. Both CPX/NPX4 and CPX/NPS1 are able to run at a faster compute clock than SPX/NPS1 due to improved use of the caches in CPX mode.
Note
SPX mode always runs all 8 XCDs, the graphs with the dotted SPX line illustrate metric divided by 8 to show per-XCD average frequency.
Summary#
This blog explained how a programer can use AMD Instinct MI300 compute and memory partitions to optimize your performance-critical applications. It introduced the MI300 GPU architecture and detailed its different compute and memory partitioning modes. It also demonstrated how to evaluate the partitioned memory and compute modes in practice by benchmarking them in two case studies.
Disclaimers#
Third-party content is licensed to you directly by the third party that owns the content and is not licensed to you by AMD. ALL LINKED THIRD-PARTY CONTENT IS PROVIDED “AS IS” WITHOUT A WARRANTY OF ANY KIND. USE OF SUCH THIRD-PARTY CONTENT IS DONE AT YOUR SOLE DISCRETION AND UNDER NO CIRCUMSTANCES WILL AMD BE LIABLE TO YOU FOR ANY THIRD-PARTY CONTENT. YOU ASSUME ALL RISK AND ARE SOLELY RESPONSIBLE FOR ANY DAMAGES THAT MAY ARISE FROM YOUR USE OF THIRD-PARTY CONTENT.