Dropless MoE Training in JAX with Primus-Turbo#

Mixture-of-Experts (MoE) models have become a standard way to scale a transformer’s parameter count without paying the full compute bill — but training them efficiently on GPUs forces an uncomfortable trade-off. The default path in JAX/MaxText keeps every expert’s tensors at a fixed shape and simply drops the tokens that overflow each expert’s capacity, trading model quality for speed. The fully dropless alternative keeps every token, but in pure JAX it hits a memory wall that makes it impractical at production scale.
AMD’s Primus-Turbo closes that gap. It brings two Composable Kernel (CK)-backed primitives to JAX — a grouped GEMM for the ragged, variable-length expert matmuls and a DeepEP dispatch/combine all-to-all for token-aware expert-parallel routing — and exposes them as first-class JAX ops through the XLA FFI, without giving up autodiff, sharding, or numerical fidelity.
In this blog, you’ll explore how we wired these kernels into a large MoE training graph in MaxText behind two simple flags. You’ll learn how grouped GEMM and DeepEP work, how to integrate a custom kernel through JAX’s FFI — custom VJPs, sharding contracts, and a once-per-process bootstrap included — and how the dropless path stacks up against the capacity-factor default on both throughput and convergence. By the end, you’ll see how Primus-Turbo turns dropless MoE training on AMD Instinct GPUs from infeasible into a practical, faster, and more memory-efficient default.
A Quick Tour of Mixture-of-Experts#
A Mixture-of-Experts (MoE) layer replaces a transformer block’s single
feed-forward network (FFN) with many FFNs (“experts”) and a small router
that sends each token to only a few. It buys parameters — and capacity — without
the full FLOP bill, since each token still touches only its top-k experts.
A representative modern large MoE looks like this:
dozens of decoder layers, hidden size in the thousands, and a large vocabulary;
hundreds of routed experts per MoE layer (e.g. 256), top-k = 8 (plus shared experts);
a sigmoid router with a learned per-expert bias for load balancing.
The figure below traces how a single token flows through one such layer — routed to its top-k of N experts, processed, and recombined by a weighted sum:
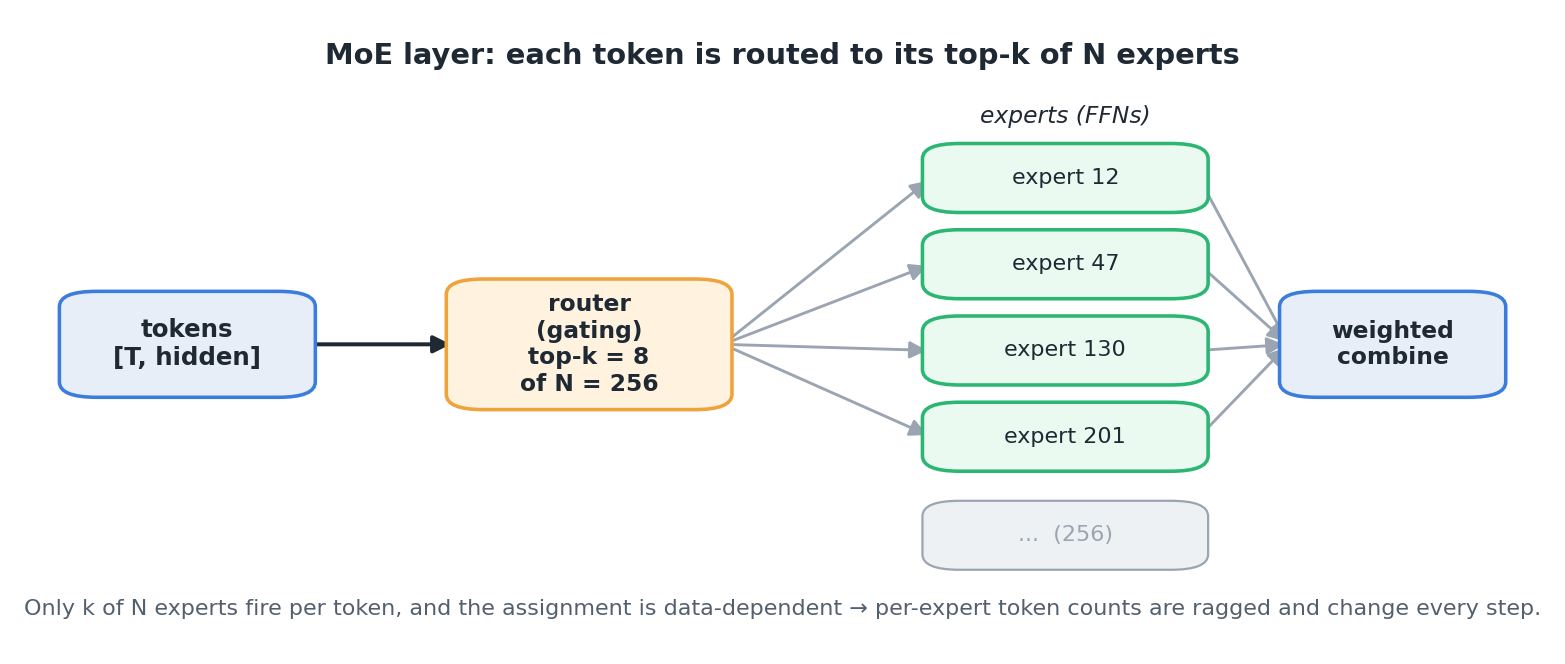
The hard part of MoE is not the experts — they are ordinary GEMMs — it is the routing. Each token’s top-k assignment is data-dependent and changes every step, so the per-expert token counts are ragged and dynamic. Two things follow from that:
The per-expert matmul is a grouped GEMM (a batch of GEMMs with different
Mdimensions), not a single dense GEMM.Under expert parallelism (EP), where experts live on different GPUs, the tokens have to be physically shuffled to the GPU that owns their expert and shuffled back afterwards — an all-to-all whose message sizes are themselves data-dependent.
How a framework handles those two facts is what separates the implementations below.
dense_matmul: Capacity-Factor Dropping#
The simplest way to make MoE shapes static is to refuse to be ragged. The
dense_matmul path (a common MaxText default) picks a capacity — the
capacity-factor idea from GShard and
Switch Transformers:
expert_capacity = capacity_factor * (num_tokens * top_k / num_experts)
Every expert is given a fixed-shape buffer of exactly expert_capacity slots.
Tokens are scattered into a [num_experts, expert_capacity, hidden] tensor; if
an expert is over-subscribed in a given step, the overflow tokens are dropped
(their contribution is zeroed), and if it is under-subscribed the buffer is
padded. The expert FFN is then a single batched GEMM over that uniform tensor.
The trade-offs are exactly what you’d expect:
Pro: fully static, uniform shapes. The expert matmul is a plain batched GEMM — lower-overhead than a grouped GEMM (equal-sized groups tile cleanly, no per-group offsets or ragged edges) — so it’s the most efficient matmul of any path, needs no custom kernel, and uses the cheapest memory (a fixed
num_experts * expert_capacity * hiddentensor, regardless of routing skew).Con: it is lossy.
capacity_factor=1.25drops a fraction of routed tokens every step; raising it to 2.0 or 4.0 recovers fidelity but spends the batched GEMM’s FLOPs on padding and inflates memory. The trade-off is numerical correctness for shape convenience — not matmul performance; the dense path remains faster.
dense_matmul is the right baseline, but “drop tokens to keep shapes square”
is not what you want for faithful MoE training.
sparse_matmul: Dropless Routing#
The sparse_matmul path is dropless: every routed token reaches its expert,
no capacity, no padding-to-capacity, no dropped tokens. It does this by sorting
tokens by expert and running a ragged GEMM over the variable-length groups.
In MaxText’s built-in implementation the pieces are:
permute:
argsortthe flattened[tokens * top_k]expert assignments, gather the activations into expert-contiguous order, and computegroup_sizes[e]= number of tokens for experte;expert matmul: a ragged GEMM over those groups, one logical matmul per expert. MaxText’s built-in
jax.lax.ragged_dotis the natural choice, but its memory footprint is prohibitive at scale: pureragged_dotOOMs at ~444 GiB even at a per-device batch size (pdbs) of 1 — it can’t train, the first reason to reach for a dedicated grouped-GEMM kernel (see Grouped GEMM);unpermute + combine: scatter the expert outputs back to token order and weight-sum the top-k contributions.
Under expert parallelism the cross-GPU shuffle is done with a
ragged_all_to_all. This is where dropless hurts. Because routing is
dynamic and there is no capacity cap, the number of tokens each rank receives is
a runtime value — but jax.jit traces a fixed-shape graph, so the receive
buffer must be a static shape, decided at trace time before any token is
routed. The only static shape guaranteed to hold is the worst case
(num_ranks * tokens * hidden, since any rank could send all its tokens to one
peer), so JAX is forced into allocating pessimistically. (Sizing it to the
true count instead would need a host round-trip — the device-to-host sync we
revisit under sync-free allocation.) That fixed memory tax scales with the per-device batch size, so
it forces a smaller batch than the dense path: at production scale (a large
MoE, hundreds of billions of parameters) the ragged_all_to_all buffer alone
pushes the dropless path to OOM at ~242 GiB at pdbs=8, where the dense path
happily runs to pdbs=16. Even with an efficient grouped-GEMM expert matmul, the
routing communication remains the primary bottleneck — dropless correctness, but
at a reduced batch size.
The figure below contrasts the two layouts side by side — capacity-factor dropping on the left, the dropless ragged path on the right:
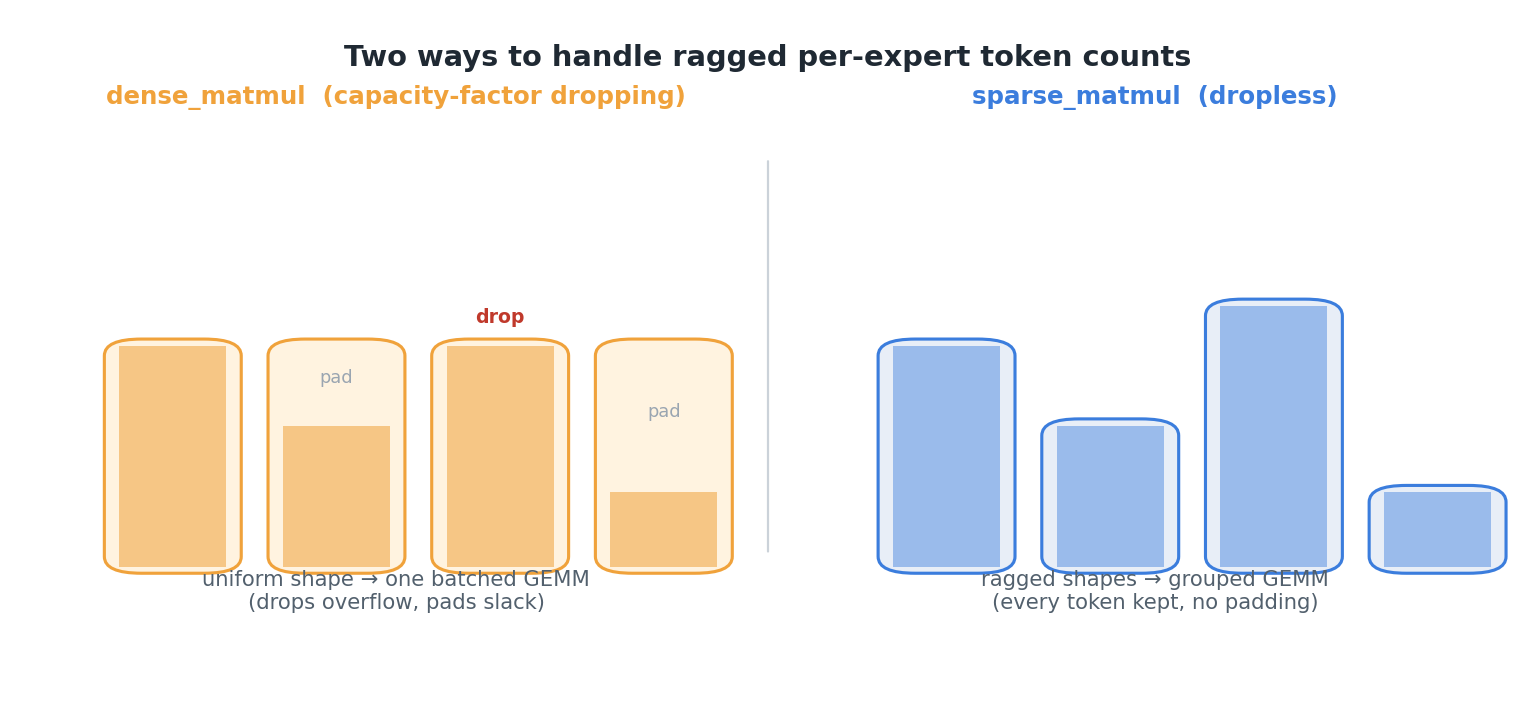
So dropless training hits two memory walls — the ragged_dot expert matmul
(the ~444 GiB above) and the ragged_all_to_all shuffle. The next two sections address these limitations in turn: a grouped-GEMM kernel that removes the matmul wall
(Grouped GEMM), and DeepEP, a leaner routing all-to-all that
trims the shuffle wall enough to claw back batch size (DeepEP).
Grouped GEMM (GMM)#
A grouped GEMM computes a batch of independent matmuls that share the same
K and N but have different M per group:
for e in range(num_experts):
out[off[e] : off[e+1]] = a[off[e] : off[e+1]] @ b[e] # [m_e, k] @ [k, n]
where off = cumsum(group_lens). The whole thing is one kernel launch over a
contiguous [sum(m_e), k] activation tensor and a [num_experts, k, n] weight
tensor — exactly the operation the dropless expert FFN needs after tokens are
sorted by expert. No padding to capacity, no dropped tokens; the kernel walks
the group offsets and does the right-sized matmul for each expert.
The backward pass needs two grouped GEMMs:
grad_a = grad_c @ bᵀ— another grouped GEMM (same group layout);grad_b = aᵀ @ grad_c— a variable-Kgrouped GEMM (the contraction dimension is the ragged one here).
A grouped GEMM carries more overhead than the dense path’s uniform batched GEMM
(capacity-factor dropping) — variable per-group M means per-group offsets and ragged tile edges — so
it is not “free” relative to dense. But it is the matmul that lets you be
dropless at all, and a well-tuned grouped-GEMM kernel is the single most
important primitive for fast dropless MoE training (the approach
MegaBlocks introduced for GPUs).
DeepEP#
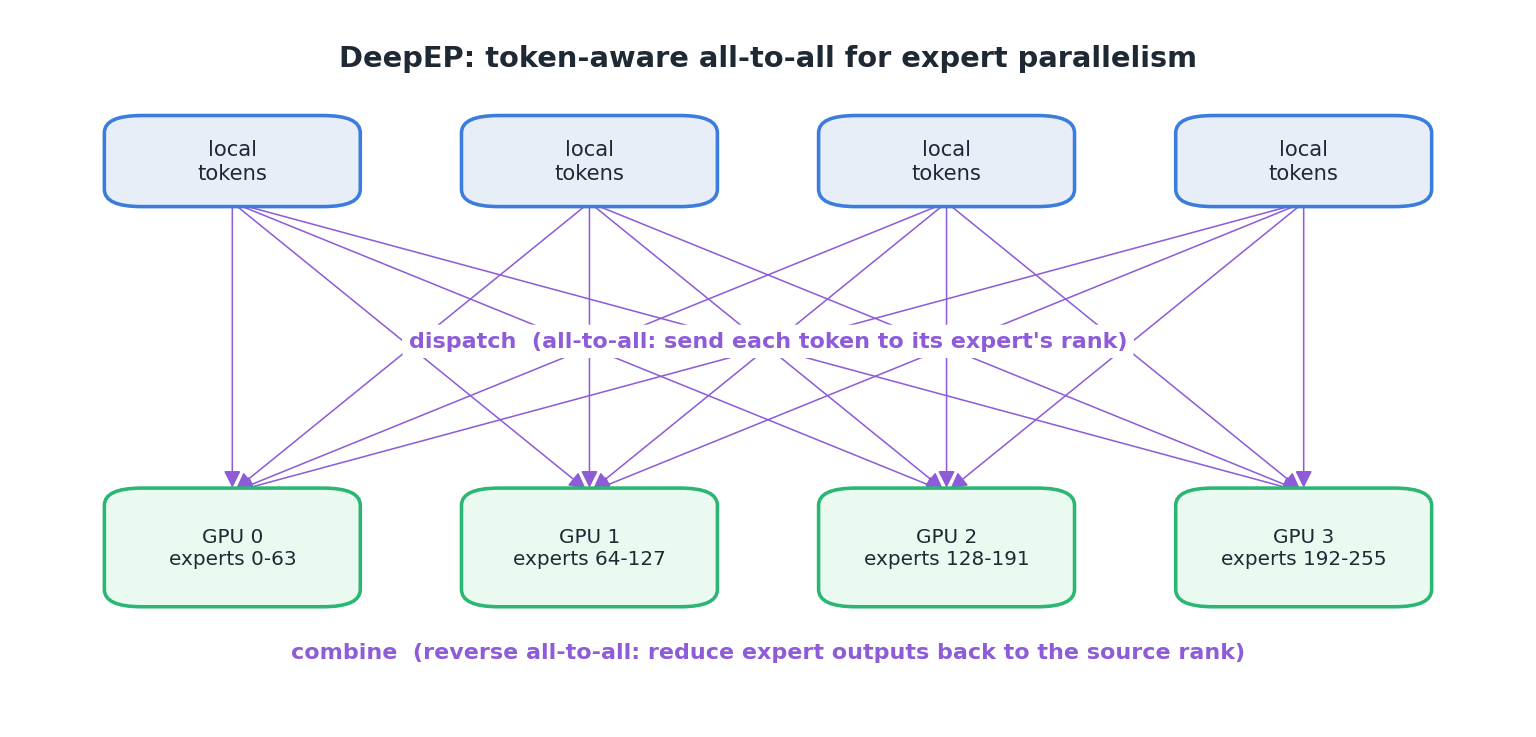
With the matmul wall handled by the grouped GEMM, the routing all-to-all is the one that’s left. DeepEP is an expert-parallel communication library: a pair of dispatch and combine kernels that implement the MoE all-to-all in a token-aware way.
dispatch sends each rank’s local tokens to the rank(s) owning their selected experts (
topk_idx), over NVLink/xGMI for intranode communication and RDMA for internode communication. Its receive buffer is still worst-case (num_tokens * ep_size) — DeepEP doesn’t escape the pessimistic allocation of dropless routing — but it manages that buffer more leanly (chunked send/recv, fewer intermediate copies than a genericragged_all_to_all), so the transient footprint is somewhat smaller.combine is the exact reverse: it sends each expert’s outputs back to the ranks that contributed the tokens and reduces (sums) them at the destination.
The figure below shows this dispatch → expert-compute → combine round-trip across GPUs:
dispatch returns an opaque handle describing the communication layout (rank/channel prefix matrices, source indices, send heads). The handle is fed back to combine so it can undo the dispatch exactly, and it lets the backward pass reuse the layout instead of recomputing it. Conceptually: dispatch’s backward is a combine, and combine’s backward is a dispatch.
DeepEP gives you a dropless routing all-to-all that trims the transient footprint of dropless routing’s pessimistic allocation — modestly, but enough to claw back a step of batch size.
Pessimistic Allocation Buys Something Back: It’s Sync-Free#
The worst-case receive buffer has a second, subtler payoff. The alternative —
allocating exactly the number of tokens each rank actually receives — means
the buffer shape depends on a value that only exists on the GPU after routing,
so you must copy those per-expert counts back to the host to set the shape.
That device-to-host (D2H) synchronization drains the CPU launch queue and
blocks compute/comm overlap. AMD’s PyTorch/Megatron stack treats removing these
syncs as a headline optimization — Feature 3: Sync-Free MoE,
driven by a num_worst_token knob and by keeping the token counts as GPU
tensors — and explicitly notes the trade: the fully sync-free level “consumes
significantly more GPU memory.”
Worst-case shapes are static, so no count ever round-trips to the host —
that is why pessimistic allocation is sync-free. In JAX this isn’t even a knob:
jax.jit requires static shapes by construction, so the DeepEP primitive uses
num_worst_tokens = num_tokens * ep_size and the entire MoE forward traces
sync-free by default. (A data-dependent shape would force a host callback —
i.e. exactly the D2H stall the PyTorch stack works to eliminate.) So the
dropless-routing memory tax and a stall-free launch stream are two sides of the same decision.
Primus-Turbo#
We now have the two primitives a dropless MoE needs; on AMD GPUs they ship in one library.
Primus-Turbo is AMD’s library of high-performance training primitives for the ROCm stack (MI300/MI350-class GPUs, gfx94x/gfx95x). It packages Composable Kernel (CK)-backed GEMMs, normalization, quantization, FP8, and — the two we care about here — a grouped GEMM and a DeepEP dispatch/combine implementation, with both PyTorch and JAX front-ends.
The JAX front-end is the interesting one for MaxText, because exposing a
hand-written HIP/CK kernel to a jax.jit-traced, XLA-compiled, autodiff’d,
shard_map-partitioned program is not just “call the kernel” — it has to become
a first-class JAX primitive. That is exactly what Primus-Turbo’s
primus_turbo.jax package does.
How Primus-Turbo Implements GMM and DeepEP for JAX#
Custom Primitives over FFI#
Each kernel is exposed as a JAX primitive whose lowering calls the C++/CK kernel through the XLA FFI (foreign-function interface). On top of the raw primitives, Primus-Turbo registers everything JAX needs to treat them as native ops:
abstract evaluation (shape/dtype rules) so tracing works;
custom_vjpso autodiff works without XLA trying (and failing) to differentiate through an opaque call;sharding rules so the op partitions correctly under
shard_map(FSDP).
What’s the alternative to FFI? There are three, and none of them fit a per-layer training hot path that calls into an existing CK/HIP kernel and a rocSHMEM-based all-to-all:
Stay in pure JAX/XLA primitives — express the op with
jax.lax.ragged_dotandjax.lax.ragged_all_to_all. This needs no custom kernel, but the pureragged_dotexpert matmul is memory-prohibitive at scale (it can’t train), and the genericragged_all_to_allhits the dropless-routing memory wall — which is exactly why the dropless configs here use a grouped-GEMM kernel and DeepEP instead. There is no pure-XLA equivalent of DeepEP’s IPC/RDMA dispatch.Write the kernel in Pallas/Mosaic — JAX’s in-tree kernel DSL, compiled by XLA with no external C++. Workable for the grouped GEMM, but you’d be reimplementing the CK kernel (and giving up its tuning), and Pallas has no path to the cross-rank rocSHMEM/IPC primitives DeepEP needs — so the communication half is a non-starter.
Host callbacks (
jax.pure_callback/io_callback) — bounce the tensor out to a Python/C++ callback. The host round-trip is orders of magnitude too slow for an op invoked on every MoE layer, and it composes poorly withjit, donation, autodiff, andshard_map.
FFI is the right tool precisely because it lets the existing, optimized CK
grouped GEMM and DeepEP communication run in-graph as an XLA custom-call —
no host round-trip, no kernel rewrite — while custom_vjp gives JAX what it
needs to differentiate and partition around the opaque call.
Grouped GEMM#
The public API is small:
from primus_turbo.jax.lax.grouped_gemm import grouped_gemm, compute_group_offs
out = grouped_gemm(a, b, group_lens, transA=False, transB=False, num_cu=-1)
Under the hood grouped_gemm is a jax.custom_vjp. The forward binds the CK
grouped-GEMM primitive (ck_grouped_gemm_p); the backward issues the two
grouped GEMMs from the grouped-GEMM section — a standard one for grad_a and a variable-K variant
(ck_grouped_gemm_variable_k_p) for grad_b. compute_group_offs turns
group_lens into the [num_experts+1] offset array the kernel walks. The CK
kernel requires int64 group lengths, which becomes a small but important
integration detail later (see the correctness details).
DeepEP Dispatch/Combine#
The public API mirrors the concept from DeepEP:
from primus_turbo.jax.lax.moe import setup, moe_dispatch, moe_combine
setup(mesh=mesh, ep_axis_name="expert", hidden_bytes=emb_dim * 2) # once per process
recv_x, recv_idx, recv_w, handle = moe_dispatch(x, topk_idx, topk_w, num_experts)
out = moe_combine(expert_out, handle)
Two design points stand out in the JAX implementation:
A one-call setup() that freezes the runtime. DeepEP has three runtime
modes — single-process multi-GPU (INPROC), one-GPU-per-process intranode
(PER_PROCESS, ≤8 ranks over NVLink/xGMI), and one-GPU-per-process internode
(PER_PROCESS over RDMA, >8 ranks). setup() auto-detects the mode from
jax.process_count() / jax.local_device_count(), pins the expert-parallel
communication group from the JAX Mesh on the "expert" axis, sizes the
per-process NVL/RDMA buffer from hidden_bytes, issues the cross-host barrier
that the internode rocSHMEM handshake needs, and then freezes all of that
(mode, EP size, SM count) into an immutable snapshot. After freezing, every
moe_dispatch/moe_combine reads the snapshot instead of re-querying mutable
globals on every trace — tighter HLO, and a clear RuntimeError if you forget
to call setup() rather than an opaque C++ crash.
dispatch/combine are each a custom_vjp whose backward is the other. The
combine’s VJP runs a dispatch with the saved handle; the dispatch’s VJP runs the
combine. The handle threads the communication layout from forward to backward so
no layout is recomputed.
The FFI Integration in MaxText#
The MaxText side of the work
(ROCm/maxtext @ feature/primus-turbo-gmm-deepep-integration)
is two self-contained commits —
grouped GEMM
and
DeepEP dispatch/combine —
that wire Primus-Turbo into MaxText/layers/moe.py behind
two config flags, with zero overhead when the flags are off.
Flag |
Effect |
Primus-Turbo primitives used |
|---|---|---|
|
replace the dropless expert matmul |
|
|
replace the EP all-to-all |
|
Grouped GEMM Swap#
Inside the sparse_matmul ragged-GEMM site, use_turbo_grouped_gemm selects
Primus-Turbo’s grouped_gemm in place of ragged_dot/Megablox. The activations
are already sorted by expert and group_sizes is already computed, so this is a
drop-in for the matmul itself.
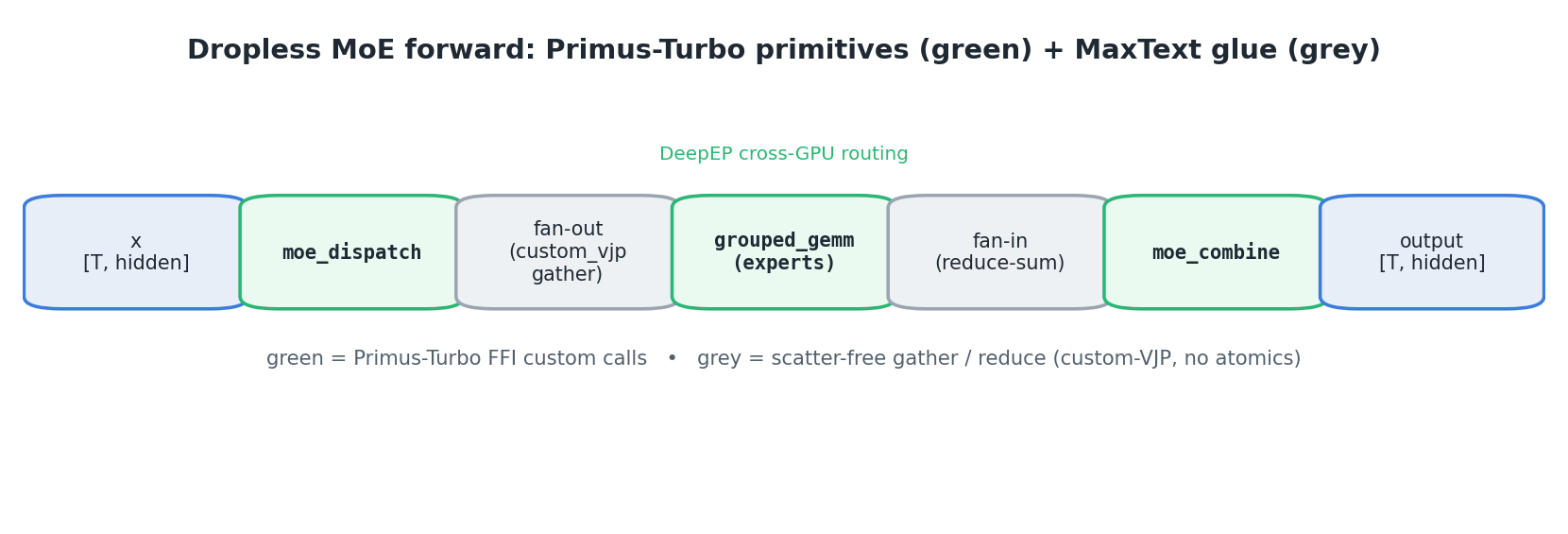
DeepEP Dispatch/Combine Swap#
When use_turbo_deepep_dispatch is on and there’s more than one expert-parallel
shard, the routing path becomes: moe_dispatch → fan-out to the sorted
per-expert layout → grouped GEMM → fan-in → moe_combine. The dispatch handle
is carried in a small _DeepEPCombineState named tuple from the dispatch site
to the combine site.
The figure below shows the full forward data flow — Primus-Turbo FFI custom calls in green, the scatter-free MaxText glue in grey:
The Lazy, Once-Per-Process setup() Bootstrap#
DeepEP’s setup() must run in whichever process executes the MoE forward,
because Primus-Turbo pins the EP communication group per process. With a
single-controller launch that’s the main process; under a Ray-based launch it’s
each worker actor — and a driver-side bootstrap would miss the actors entirely.
The integration therefore folds setup() into a once-per-process guarded helper
called at the top of the DeepEP branch of the MoE forward:
def _ensure_deepep_setup(mesh, config):
global _deepep_setup_done
if _deepep_setup_done:
return
try:
from primus_turbo.jax.lax.moe import setup as _deepep_setup
except ImportError:
_deepep_setup = None
if _deepep_setup is not None:
_deepep_setup(mesh=mesh, ep_axis_name="expert", hidden_bytes=config.emb_dim * 2)
_deepep_setup_done = True
The guarded import keeps the integration working against both newer Primus-Turbo
(which requires explicit setup()) and older builds (which auto-bootstrap and
expose no setup()).
The Subtle Bits That Make It Correct#
A faithful integration is more than calling the kernels. The parts that required care were:
Fan-out / fan-in without atomic scatters. After dispatch, tokens must be fanned out to the
[N*K, hidden]sorted-by-expert layout and, after the experts run, folded back to one row per received token. Naively this is a duplicate-index gather whose autodiff emits an atomic scatter-add on the backward — slow and non-deterministic. The integration implements the fan-out as acustom_vjp: the forward is a single composed gatherrecv_x[sort_idx // K]; the backward inverts the permutation withargsortand folds the top-k duplicates with a plain reduce-sum, never a scatter. Fan-in is a reshape + weightedsumover thetop_kaxis (float32 accumulation), again no scatter.Masking out-of-group rows. Rows beyond
sum(group_sizes)are zeroed at both the dispatch fan-out and before combine; without that, garbage gradients from padding rows fold back through the reduce-sum and stall training at initialization.int64 group lengths, thread-locally. The CK grouped GEMM requires int64
group_lens, but flipping global x64 on breaksargsort(an XLA-ROCm s32/s64 scatter mismatch). The integration wraps just the kernel call injax.experimental.enable_x64()— thread-local, safe for concurrentshard_mapthreads.bf16 only. The DeepEP path asserts
dtype == bfloat16; FP8 dispatch is a separate kernel surface and is explicitly out of scope here.
The net effect: turning on the two flags gives you a dropless MoE
that routes every token through DeepEP and runs the experts through a CK grouped
GEMM, differentiates correctly, and traces cleanly under FSDP — while the default
(sparse_matmul=false) graph is byte-for-byte unchanged.
Experiments#
Primus-Turbo is designed to make dropless MoE practical on AMD Instinct GPUs; the experiments in this section evaluate how well it delivers on that promise and answer these empirical questions: is dropless feasible, is it fast, and does it actually train better?
Setup. All runs are DeepSeek-V3 671B on 8 nodes × 8 AMD MI355X (64 GPUs,
288 GB HBM/device), sequence length 4096, FSDP=8, bf16, remat_policy: full. The
base job config is
configs/deepseek3-671b.gpu.yml;
the five configs below differ only in the MoE flags layered on top of it. The
software stack is the rocm/jax-training:maxtext-v26.2 container with
Primus-Turbo (JAX build, gfx950) installed manually on top. Five configs:
Tag |
Path |
|---|---|
|
capacity-factor dropping ( |
|
dropless via Primus-Turbo grouped GEMM + |
|
dropless via Primus-Turbo grouped GEMM + DeepEP |
Note that vanilla sparse_matmul (pure jax.lax.ragged_dot, no grouped-GEMM
kernel) is not in this list: it OOMs at ~444 GiB even at pdbs=1, so it is
infeasible to train at this scale. Both dropless configs above therefore use the
Primus-Turbo grouped GEMM, and differ only in the all-to-all (ragged_all_to_all
vs DeepEP) — which is what makes their head-to-head a clean isolation of the
routing communication.
Scope. This is a controlled A/B comparison, not a peak-performance benchmark. Every config runs the same fixed recipe with no per-config kernel or XLA tuning, so the relative gaps between configs are the result — read the deltas, not the absolute magnitudes. The absolute throughput is a floor (there is tuning headroom), not a ceiling.
Throughput (Synthetic Data)#
Steady-state tokens/s/device (TGS), dataset_type=synthetic, mean over steps
5–14 (FSDP=8):
pdbs |
dense-cf1.25 |
dense-cf2 |
dense-cf4 |
sparse-gmm |
sparse-gmm-deepep |
|---|---|---|---|---|---|
4 |
961.1 |
813.1 |
532.6 |
757.1 |
873.4 |
7 |
1209.8 |
934.3 |
575.5 |
974.5 † |
1121.6 |
8 |
1292.7 |
960.1 |
580.7 |
OOM 242 GiB |
1179.7 |
9 |
1399.0 |
994.8 |
OOM 212 GiB |
OOM 242 GiB |
1189.4 |
16 |
1438.1 |
1015.1 |
OOM 278 GiB |
— |
OOM 316 GiB |
† sparse-gmm at pdbs=7 only fits with a reduced memory fraction.
What the Numbers Say#
DeepEP claws back a step of batch size. Both dropless paths pay the pessimistic worst-case allocation of dropless routing, but DeepEP’s buffer management is somewhat leaner — a ~40 GiB (~15%) lower transient at equal pdbs. That modest reduction is enough to cross the feasibility threshold: the built-in
sparse-gmmpath OOMs at pdbs=8 (~242 GiB), whilesparse-gmm-deepepruns at pdbs=8 and even pdbs=9. It doesn’t make dropless cheap — it makes it fit one notch higher.DeepEP is the fastest dropless option. Across every feasible pdbs,
sparse-gmm-deepepbeatssparse-gmm(e.g. 1121.6 vs 974.5 at pdbs=7) and lands within striking distance of the lossydense-cf1.25baseline while being dropless. Peak dropless throughput issparse-gmm-deepepat pdbs=8 → 1179.7 TGS.The capacity-factor tax is real.
dense-cf2/dense-cf4raise fidelity by raising capacity, but throughput collapses (cf4 ≈ 575 TGS and OOMs above pdbs=8). The dropless DeepEP path delivers full fidelity at roughly 2× the cf4 throughput.
Convergence and Loss Quality (C4 Data)#
The synthetic sweep above measures throughput and feasibility only — fixed
inputs over a short run say nothing about whether the model learns correctly. For
that we need a real training run — DeepSeek-V3 671B on
C4 (dataset_type=grain, parquet
c4-train-*-of-01024.parquet, HF
deepseek-ai/DeepSeek-V3-Base tokenizer, seq 4096), 2000 steps, FSDP=8,
pdbs=7, same initialization, all five configs. The per-step training loss (TensorBoard
learning/loss) is plotted in the figure below:
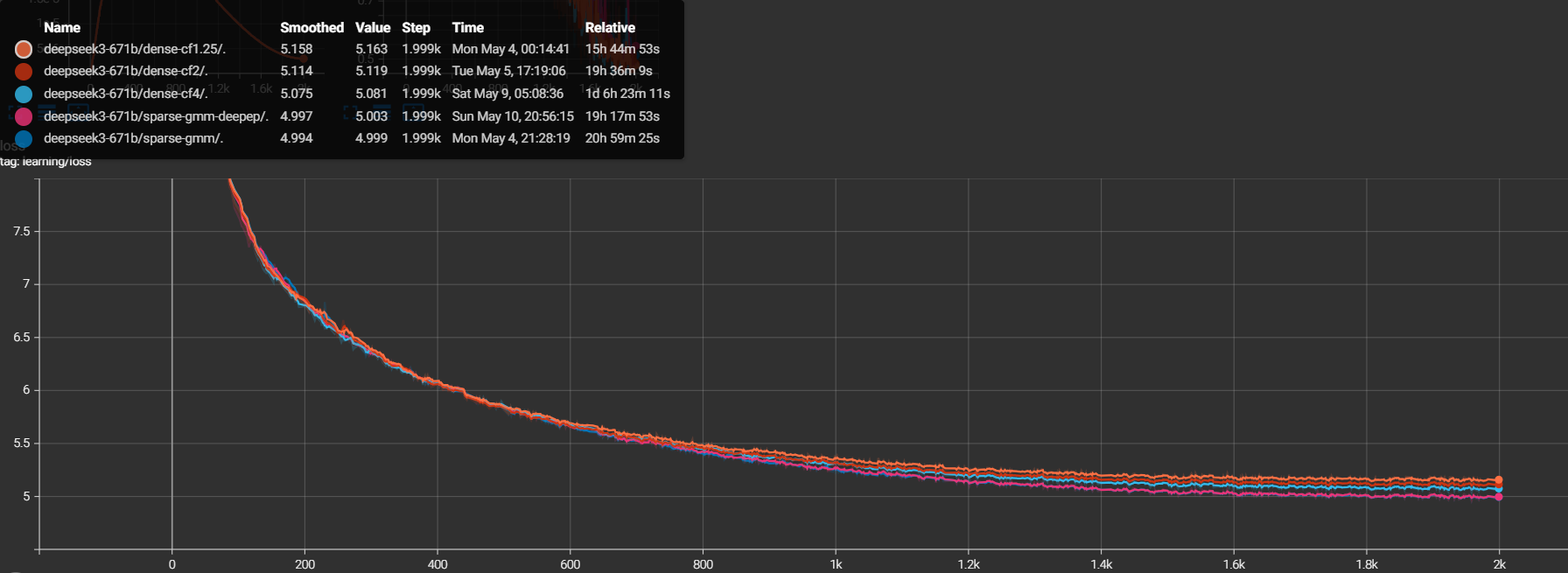
(These C4 runs used an earlier build of the same integration — the kernels and routing algorithm are identical to the current one.)
Two clean conclusions:
DeepEP dropless matches the
ragged_all_to_alldropless path. The two paths share the same grouped-GEMM expert matmul and differ only in the all-to-all, so ideally their curves would be identical. In practicesparse-gmm-deepep(5.003) and theragged_all_to_allsparse-gmm(4.999) agree to 0.004 at step 2000 and track each other across the entire curve. That residual is run-to-run non-determinism accumulated over 2000 steps (non-deterministic reductions / kernel scheduling), not an algorithmic gap — the DeepEP communication + grouped GEMM + custom-VJP fan-out/fan-in reproduce dropless training end-to-end, not just step-locally.Dropless is Pareto-superior to capacity-factor dropping at the same batch size —
sparse-gmm-deepepbeatsdense-cf{1.25, 2, 4}on both axes:Lower loss at a fixed step (convergence quality — more learned per step). Both dropless paths converge below every dense config, and within the dense family the loss falls monotonically with capacity (cf1.25 = 5.163 → cf2 = 5.119 → cf4 = 5.081): the fewer tokens you drop, the lower the loss, and dropless is the limit. DeepEP reaches 5.003 — a 0.16-nat improvement over the
dense-cf1.25default — because it drops nothing.Lower loss at a fixed wall-clock time (time-to-loss). On C4 the dropless path runs ~19% fewer steps per hour than
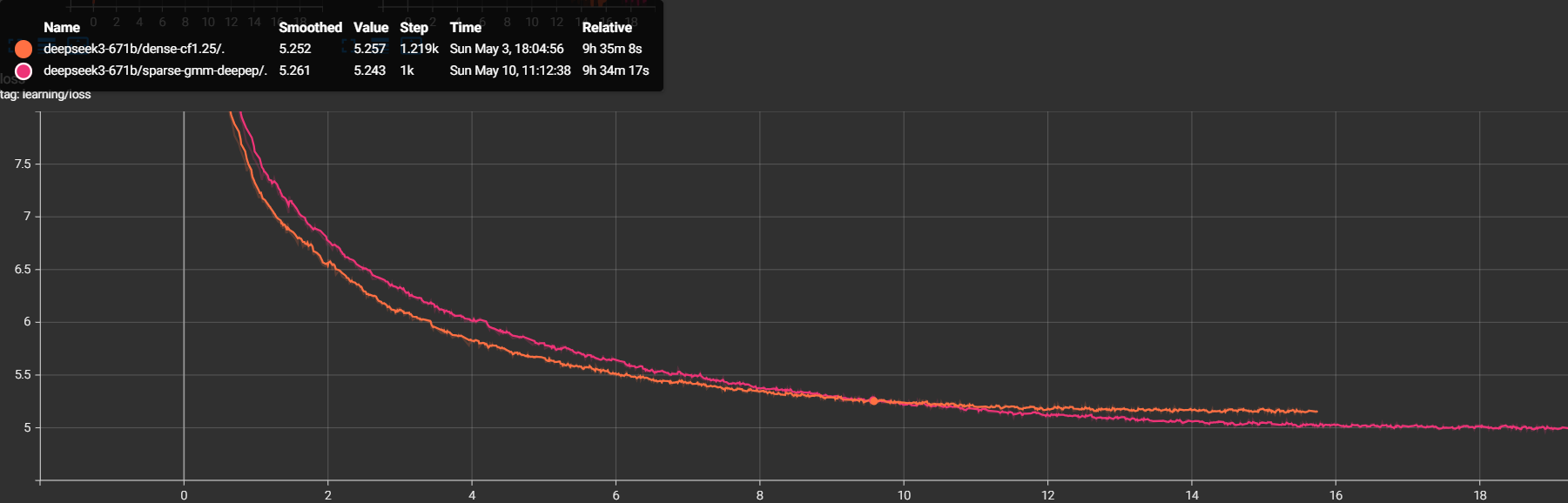
dense-cf1.25(818 vs 1009 TGS; the throughput cost is broken down in the next section), yet it still reaches a lower loss at equal wall-clock — the per-step quality gain more than pays back the lost step rate.
The figure below makes this time-to-loss comparison concrete, plotting loss against wall-clock time for the dropping default and the dropless path:
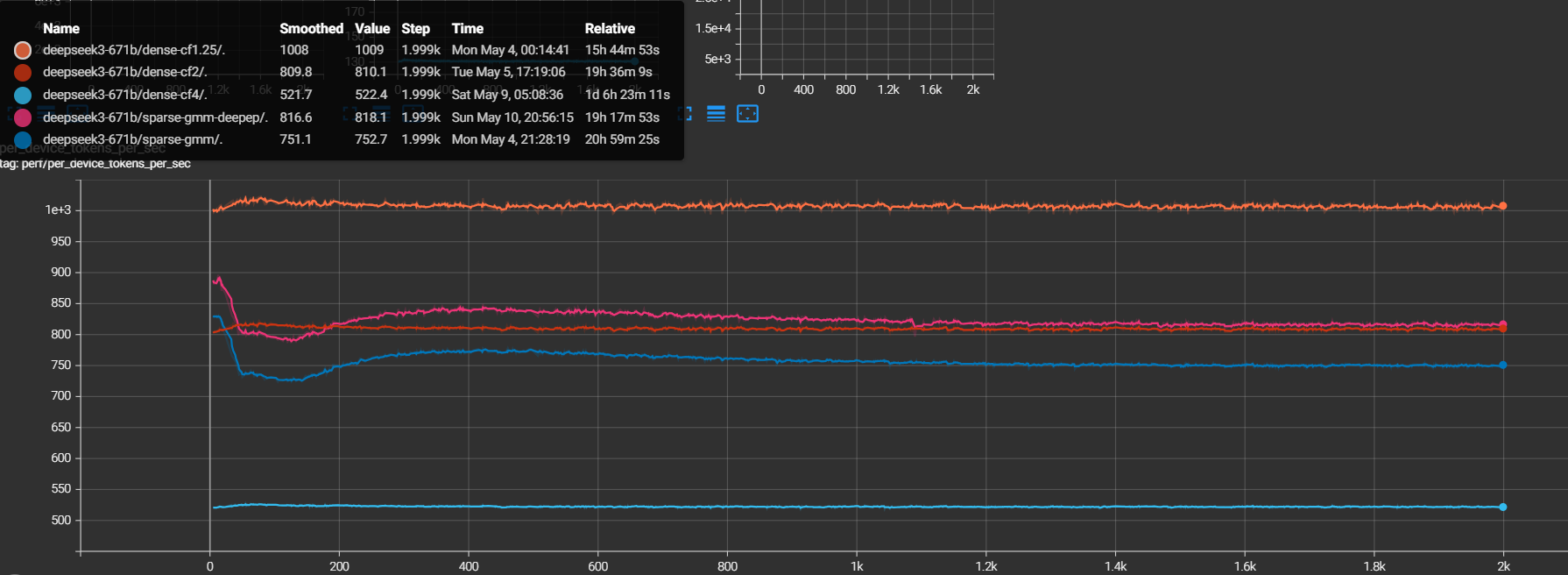
The Throughput Cost on Real Data#
There is one cost to be honest about. Moving from synthetic to real C4 data lowers
every config’s TGS — but most of that is just the data-loading overhead the
synthetic loader doesn’t pay, and it hits dense and dropless alike (dense-cf1.25
itself drops ~17%). The dropless-specific signal is the gap between
dense-cf1.25 and the dropless paths, which widens sharply on real data. TGS at
pdbs=7 (FSDP=8):
config |
synthetic |
C4 |
|---|---|---|
dense-cf1.25 |
1210 |
1009 |
dense-cf2 |
934 |
810 |
dense-cf4 |
576 |
522 |
sparse-gmm |
975 |
753 |
sparse-gmm-deepep |
1122 |
818 |
sparse-gmm-deepep trails dense-cf1.25 by only ~7% on synthetic (1122 vs
1210), but by ~19% on C4 (818 vs 1009). Because dense-cf1.25 is
structurally immune to routing skew — capacity-factor dropping pads every
expert to a fixed size no matter how tokens route — that extra widening is the
cost of routing imbalance on the dropless path: real text concentrates tokens
on a few popular experts, so the ragged grouped GEMM and the dispatch/combine
all-to-all stall on the busiest expert. Synthetic routing is near-uniform and
hides this.
Importantly, this imbalance is tunable, not fixed: a stronger MoE load-balancing (auxiliary) loss or router z-loss tuning strategy would flatten the per-expert token distribution and narrow the gap. None of the runs here touched those knobs — every config used the model’s default routing and loss settings — so the measured tax is an upper bound, not an inherent property of the dropless path.
Even so, two results hold on real data:
sparse-gmm-deepepis markedly faster thansparse-gmm(818 vs 753, +9%): DeepEP’s dispatch tolerates the imbalance better than theragged_all_to_allpath.sparse-gmm-deepepstays at or abovedense-cf2(818 vs 810) — the dropless DeepEP path matches a mid-capacity dense config on throughput while being strictly better on loss.
The per-device throughput on C4 is summarized in the figure below:
And this throughput tax is already paid for by the time-to-loss result of Convergence and Loss Quality:
even after giving up ~19% step rate to dense-cf1.25, sparse-gmm-deepep still
reaches lower loss at equal wall-clock. The imbalance cost is real, but the
convergence-quality gain more than covers it.
Summary#
Dropless MoE has historically forced an unhappy choice on the ROCm/JAX stack:
keep shapes square and drop tokens (dense_matmul), or stay dropless and
hit the memory walls of the ragged path — a prohibitively expensive ragged_dot
expert matmul and a worst-case ragged_all_to_all shuffle (sparse_matmul).
Primus-Turbo removes the dilemma by bringing two CK-backed primitives to JAX — a
grouped GEMM for the ragged expert matmul and a DeepEP dispatch/combine
for a token-aware routing all-to-all — and exposing them as first-class JAX ops
with autodiff, shard_map sharding, and a clean setup() contract.
Wired into MaxText behind two use_turbo_* flags — with careful custom-VJP
fan-out/fan-in, out-of-group masking, thread-local int64, and a once-per-process
bootstrap that covers both single-controller and Ray launches — the result is an
MoE training path that is:
dropless (every token reaches its expert),
less memory-constrained (its leaner all-to-all buffer claws back a batch-size step — fits pdbs=8–9 where the
ragged_all_to_allpath OOMs at 8),the fastest dropless option (~1180 TGS at pdbs=8, ~2× the cf4 capacity path),
numerically faithful (loss tracks the
ragged_all_to_alldropless path to 0.004 over a 2000-step C4 run),and Pareto-superior to capacity-factor dropping at equal batch size — lower C4 loss both per step (5.003 vs 5.163 for
dense-cf1.25) and per wall-clock,
all with zero overhead when the flags are off. Kernels, memory, throughput, gradients, and end-to-end C4 convergence are all verified (FSDP=8).
The credit for making this practical goes to Primus-Turbo: by providing CK-backed grouped GEMM and DeepEP kernels as clean, autodiff- and sharding-aware JAX ops, it turns dropless MoE on AMD Instinct GPUs from an infeasible research path into a default you can turn on with a single flag. If you train MoE models in JAX/MaxText, we encourage you to enable the flags on your own runs and evaluate the benefits of dropless training firsthand.
Additional Resources#
Mixture-of-Experts#
Shazeer et al., Outrageously Large Neural Networks: The Sparsely-Gated Mixture-of-Experts Layer (2017) — arXiv:1701.06538
Lepikhin et al., GShard (2020) — arXiv:2006.16668; Fedus et al., Switch Transformers (2021) — arXiv:2101.03961 (the capacity-factor / token-dropping lineage of
dense_matmul)Gale et al., MegaBlocks: Efficient Sparse Training with Mixture-of-Experts (2022) — arXiv:2211.15841 (dropless / grouped-GEMM; see
sparse_matmuland Grouped GEMM)Zoph et al., ST-MoE: Designing Stable and Transferable Sparse Expert Models (2022) — arXiv:2202.08906 (router z-loss; see The Throughput Cost on Real Data)
DeepSeek-AI, DeepSeekMoE (2024) — arXiv:2401.06066; DeepSeek-V3 Technical Report (2024) — arXiv:2412.19437
Systems & Libraries#
DeepEP (DeepSeek expert-parallel dispatch/combine) — github.com/deepseek-ai/DeepEP
Composable Kernel (CK), the GEMM backend — github.com/ROCm/composable_kernel
rocSHMEM (GPU-centric OpenSHMEM, DeepEP’s internode substrate) — rocm.docs.amd.com/projects/rocSHMEM
JAX foreign-function interface (FFI) — docs.jax.dev/en/latest/ffi.html
JAX Pallas (in-tree kernel DSL) — docs.jax.dev/en/latest/pallas
C4 (Colossal Clean Crawled Corpus), the training data — Raffel et al., T5 (2019) — arXiv:1910.10683
MaxText — github.com/AI-Hypercomputer/maxtext; the integration lives on the AMD fork branch
ROCm/maxtext @ feature/primus-turbo-gmm-deepep-integrationPrimus-Turbo — github.com/AMD-AGI/Primus-Turbo
maxtext-slurm (the launcher used for these runs — for launching and observing MaxText training on Slurm-managed GPU clusters) — github.com/AMD-AGI/maxtext-slurm
PyTorch/Megatron counterpart (Primus-Turbo MoE, incl. Sync-Free MoE): MoE Training Best Practices on AMD GPUs
Disclaimers#
The information presented in this document is for informational purposes only and may contain technical inaccuracies, omissions, and typographical errors. The information contained herein is subject to change and may be rendered inaccurate for many reasons, including but not limited to product and roadmap changes, component and motherboard version changes, new model and/or product releases, product differences between differing manufacturers, software changes, BIOS flashes, firmware upgrades, or the like. Any computer system has risks of security vulnerabilities that cannot be completely prevented or mitigated. AMD assumes no obligation to update or otherwise correct or revise this information.
However, AMD reserves the right to revise this information and to make changes from time to time to the content hereof without obligation of AMD to notify any person of such revisions or changes.
THIS INFORMATION IS PROVIDED “AS IS.” AMD MAKES NO REPRESENTATIONS OR WARRANTIES WITH RESPECT TO THE CONTENTS HEREOF AND ASSUMES NO RESPONSIBILITY FOR ANY INACCURACIES, ERRORS, OR OMISSIONS THAT MAY APPEAR IN THIS INFORMATION. AMD SPECIFICALLY DISCLAIMS ANY IMPLIED WARRANTIES OF NON-INFRINGEMENT, MERCHANTABILITY, OR FITNESS FOR ANY PARTICULAR PURPOSE. IN NO EVENT WILL AMD BE LIABLE TO ANY PERSON FOR ANY RELIANCE, DIRECT, INDIRECT, SPECIAL, OR OTHER CONSEQUENTIAL DAMAGES ARISING FROM THE USE OF ANY INFORMATION CONTAINED HEREIN, EVEN IF AMD IS EXPRESSLY ADVISED OF THE POSSIBILITY OF SUCH DAMAGES.
AMD, the AMD Arrow logo, AMD Instinct, AMD ROCm, and combinations thereof are trademarks of Advanced Micro Devices, Inc. PyTorch is a registered trademark of Meta Platforms, Inc. Other product names used in this publication are for identification purposes only and may be trademarks of their respective companies.
© 2026 Advanced Micro Devices, Inc. All rights reserved